Astronautica
Esta es con mucho, la más antigua y mayor afición, y a la que más tiempo le he dedicado, pero a la hora de incluir temas, sería tan extensa como inacabable, por lo que sólo se incluyen temas puntuales, escuetos y a ser posible aclaratorios y didácticos.
Chang’e 6
Chang’e 6
Primeras muestras de la cara oculta de la Luna
La misión Chang’e 6 fue lanzada el 3 de mayo de 2024 a las 09:27 UTC mediante el Larga Marcha CZ-5 Y8. Tras una corrección de trayectoria, el 8 de mayo a las 02:12 UTC se colocó en una órbita inicial retrógrada de 200 x 8600 kilómetros y un periodo de 12 horas mediante el motor del segmento orbital. Desde esta órbita inicial, ese mismo día a l as 08:14 UTC la sonda desplegó el pequeño cubesat paquistaní ICUBE-Q. En los días posteriores se situó en una órbita con un periodo de 4 horas y, finalmente, en una órbita circular de 200 kilómetros. El 30 de mayo el segmento de descenso se separó del segmento orbital y redujo su periastro hasta los 15 kilómetros. El 1 de junio a las 22:09 UTC el motor de la etapa de descenso se encendió cuando estaba en el periastro y comenzó el encendido final. El alunizaje tuvo lugar el 1 de junio de 2024 a las 22:23 UTC en el anillo exterior del cráter Apolo, en la cuenca de impacto Polo Sur-Aitken (SPA). Según el equipo de la sonda LRO de la NASA, las coordenadas de aterrizaje fueron 41,6385º sur, 206,0148º este, con una altitud de 5256 metros por debajo del radio medio lunar.
as 08:14 UTC la sonda desplegó el pequeño cubesat paquistaní ICUBE-Q. En los días posteriores se situó en una órbita con un periodo de 4 horas y, finalmente, en una órbita circular de 200 kilómetros. El 30 de mayo el segmento de descenso se separó del segmento orbital y redujo su periastro hasta los 15 kilómetros. El 1 de junio a las 22:09 UTC el motor de la etapa de descenso se encendió cuando estaba en el periastro y comenzó el encendido final. El alunizaje tuvo lugar el 1 de junio de 2024 a las 22:23 UTC en el anillo exterior del cráter Apolo, en la cuenca de impacto Polo Sur-Aitken (SPA). Según el equipo de la sonda LRO de la NASA, las coordenadas de aterrizaje fueron 41,6385º sur, 206,0148º este, con una altitud de 5256 metros por debajo del radio medio lunar.
 Partes de Chang’e 6 (CASC).
Partes de Chang’e 6 (CASC).
Emblema de la misión (CNSA).

Tras recoger muestras de la cara oculta mediante un taladro y un brazo robot y desplegar una pequeña cámara móvil que fotografió a la sonda en la superficie lunar, el 3 de junio de 2024 a las 23:38 UTC la etapa de ascenso del segmento de superficie de la misión despegó desde la cara oculta, dejando la etapa de descenso en la superficie. Durante los dos días de actividad, el sensor sueco de viento solar NILS (Negative Ions on Lunar Surface), suministrado por la ESA, funcionó durante un total de tres horas y confirmó por primera vez la existencia de iones negativos en la superficie lunar (además, NILS ha sido el primer instrumento oficial de la ESA en la superficie de la Luna). La etapa de ascenso quedó situada en una órbita inicial de 15 x 180 kilómetros seis minutos más tarde y luego elevo su periastro hasta los 50 x 180 kilómetros. Una vez en la posición adecuada con respecto al segmento orbital, efectuó otra ignición para colocarse en una órbita de 180 x 210 kilómetros. Cuando estuvo cerca del módulo orbital realizó el último encendido principal para circularizar la órbita.
Lanzamiento de la Chang’e 6 (CNSA).

Panorama de la zona de alunizaje en la cara oculta (CNSA).

La sonda Chang’e 6 en la cuenca del Polo Sur-Aitken de la cara oculta de la Luna con el brazo robot desplegado de 3,7 metros. Imagen tomada por un pequeño rover-cámara desplegable (CNSA).

El pequeño rover-cámara que tomó la imagen anterior (CNSA).

La Chang’e 6 vista en la superficie lunar por la sonda LRO de la NASA (NASA).

Zona de aterrizaje de la Chang’e 6 (NASA).
El 6 de junio a las 06:48 UTC la etapa de ascenso se acopló con el segmento orbital utilizando un sistema de pinzas y barras ideado para mitigar la gran diferencia de masa entre los dos vehículos y que, además, permite tolerar errores relativamente importantes en cuanto a posición y velocidad comparado con otros métodos de acoplamiento. El acoplamiento tuvo lugar cerca del límite oriental entre la cara visible y la oculta. Tres pinzas situadas en el módulo orbital se cerraron sobre tres barras de la etapa superior. Durante 1 segundo las pinzas se cerraron parcialmente y en los 10 segundos restantes el sistema fue corrigiendo la secuencia de cerrado para que quedasen alineadas las naves. En los últimos 10 segundos del acoplamiento se bloqueó la posición relativa. Luego, el contenedor de muestras se trasladó de la etapa de ascenso hasta la cápsula de retorno en el módulo orbital mediante un mecanismo de transferencia con cremallera mecánica. Después la etapa de ascenso se separó y sería desorbitada, impactando contra la superficie lunar, alrededor del 8 de junio.
la gran diferencia de masa entre los dos vehículos y que, además, permite tolerar errores relativamente importantes en cuanto a posición y velocidad comparado con otros métodos de acoplamiento. El acoplamiento tuvo lugar cerca del límite oriental entre la cara visible y la oculta. Tres pinzas situadas en el módulo orbital se cerraron sobre tres barras de la etapa superior. Durante 1 segundo las pinzas se cerraron parcialmente y en los 10 segundos restantes el sistema fue corrigiendo la secuencia de cerrado para que quedasen alineadas las naves. En los últimos 10 segundos del acoplamiento se bloqueó la posición relativa. Luego, el contenedor de muestras se trasladó de la etapa de ascenso hasta la cápsula de retorno en el módulo orbital mediante un mecanismo de transferencia con cremallera mecánica. Después la etapa de ascenso se separó y sería desorbitada, impactando contra la superficie lunar, alrededor del 8 de junio.
Recreación del acoplamiento entre la etapa de ascenso y el orbitador (CASC).

La etapa de ascenso cerca del acoplamiento (CNSA).

Transferencia del cilindro de muestras de la etapa de ascenso a la cápsula del módulo orbital (CNSA).
Por su parte, el segmento orbital expulsó el sistema de acoplamiento —antes del acoplamiento había eyectado el cono de conexión con el segmento de aterrizaje— y esperó en órbita lunar a que la Tierra y la Luna se alineasen para poder regresar a la Tierra. El 20 de junio a las 15:38 UTC el orbitador completó con éxito el encendido para regresar a la Tierra y quedó situado en una órbita amplia con una inclinación de 41,9º con respecto a nuestro planeta. El estudio de las muestras de la cara oculta de la Luna es una prioridad de la comunidad científica internacional debido a la diferencia entre este hemisferio y el visible (la corteza de la cara oculta presenta una menor superficie cubierta por basaltos de los maria debido a su mayor espesor). Además, la cuenca Polo Sur-Aitken (SPA) es la más antigua y grande de la Luna. Su estudio permitirá datar mejor la historia de nuestro satélite y entender su evolución. La NASA ha propuesto varias misiones de tipo New Frontiers para traer muestras de la cara oculta de la Luna, como es el caso de la propuesta MoonRise, pero ninguna salió adelante. Sea como sea, hoy, 55 años después de que el Apolo 11 trajese las primeras muestras lunares, ya tenemos en la Tierra rocas y regolito de la cara oculta de la Lun.

Localización de la cápsula en el módulo orbital con el sistema de acoplamiento y el cono adaptador y los distintos pernos explosivos (CASC).
Las 3 cápsulas lunares chinas.


La cápsula en el módulo orbital (CNSA).

Partes de Chang’e 6 (CASC).
El 30 de mayo a una hora indetermi nada el segmento de descenso se separó, como estaba previsto, del segmento orbital. Posteriormente, el segmento de descenso redujo su periastro hasta los 15 kilómetros. El 1 de junio a las 22:09 UTC el motor de la etapa de descenso se encendió cuando estaba en el periastro y comenzó el encendido final (una de las pocas efemérides que ha hecho públicas la CNSA). El motor hipergólico YF-36A funciona durante 310 segundos en total y es capaz de modular su empuje entre los 1,5 y los 7,5 kilonewton, con un impulso específico de 313 segundos. Se puede encender hasta 30 veces y es similar al de las etapas de descenso de las sondas Chang’e 3, 4 y 5 y al del módulo de aterrizaje de la Tianwen 1. Este es el mismo motor que usará el módulo lunar tripulado Lanyué en el futuro (empleará cuatro unidades). Sus dimensiones son de 1,46 metros de largo y tiene 0,83 metros de diámetro, con una masa de 39 kg. Durante el descenso, la sonda usa también 16 motores de control de posición de 150 newton de empuje. Todos estos motores están alimentados por cuatro tanques de propergoles hipergólicos de 500 litros cada uno situados en la etapa de descenso.
nada el segmento de descenso se separó, como estaba previsto, del segmento orbital. Posteriormente, el segmento de descenso redujo su periastro hasta los 15 kilómetros. El 1 de junio a las 22:09 UTC el motor de la etapa de descenso se encendió cuando estaba en el periastro y comenzó el encendido final (una de las pocas efemérides que ha hecho públicas la CNSA). El motor hipergólico YF-36A funciona durante 310 segundos en total y es capaz de modular su empuje entre los 1,5 y los 7,5 kilonewton, con un impulso específico de 313 segundos. Se puede encender hasta 30 veces y es similar al de las etapas de descenso de las sondas Chang’e 3, 4 y 5 y al del módulo de aterrizaje de la Tianwen 1. Este es el mismo motor que usará el módulo lunar tripulado Lanyué en el futuro (empleará cuatro unidades). Sus dimensiones son de 1,46 metros de largo y tiene 0,83 metros de diámetro, con una masa de 39 kg. Durante el descenso, la sonda usa también 16 motores de control de posición de 150 newton de empuje. Todos estos motores están alimentados por cuatro tanques de propergoles hipergólicos de 500 litros cada uno situados en la etapa de descenso.
Vista lateral del segmento de descenso de la Chang’e 5, similar a la Chang’e 6 (CASC).

Motor de la etapa de descenso de 1,5-7,5 kN (CASC).

Sistema de propulsión de la etapa de descenso (CASC).
La sonda siguió un perfil de descenso parecido al de la Chang’e 5, aunque no se han comunicado diferencias sustanciales. Al alcanzar los 2,5 kilómetros de altitud, la sonda, guiada por radar y lídar, ya había eliminado casi toda su velocidad horizontal y giró para colocarse en vertical. A partir de ese momento, a 2 kilómetros de altitud, la nave comenzó a buscar posibles obstáculos de gran tamaño para evitarlos usando datos del lidar y de varios sensores (lídar, altímetro de microondas y cámaras de navegación). A cien metros de altitud y a diez segundos del aterrizaje, la sonda había eliminado su velocidad horizontal completamente y quedó suspendida durante unos 2 segundos mientras el sistema de navegación óptica elegía la zona óptima de aterrizaje. A 30 metros de altitud el motor principal redujo su empuje para evitar que las rocas y el regolito desplazados pudieran dañar el vehículo. Par evitar que el regolito expulsado por el motor pudiera confundir a los sensores de navegación, la sonda iba equipada con sensores de rayos gamma que detectan la proximidad del terreno derivados de los empleados en las naves tripuladas Shenzhou. El motor se apagó a pocos metros de altura y la sonda cayó en caída libre hasta contactar con el suelo lunar.
El tren de aterrizaje de la etapa de descenso va equipado con amortiguadores y una estructura deformable para absorber la energía del impacto. Durante dos días, la Chang’e  6 recogerá muestras de la cara oculta usando un taladro capaz de llegar a 2,5 metros de profundidad y un brazo robot. El taladro acumula las muestras dentro de una manguera de tela y las deposita enrolladas directamente en el cilindro principal situado en la etapa de ascenso. El brazo robot sirve para recoger regolito y rocas seleccionadas por el control de tierra que luego serán depositados en un contenedor localizado en la etapa de descenso. Al terminar las operaciones de superficie, el brazo robot introduce este contenedor en el recipiente principal de la etapa de ascenso usando cámaras para guiarse en la maniobra. Los científicos e ingenieros de la misión trabajan contrarreloj para construir una réplica del lugar del alunizaje una vez recibidas las primeras imágenes y planear así los mejores procedimientos para recoger las muestras de superficie.
6 recogerá muestras de la cara oculta usando un taladro capaz de llegar a 2,5 metros de profundidad y un brazo robot. El taladro acumula las muestras dentro de una manguera de tela y las deposita enrolladas directamente en el cilindro principal situado en la etapa de ascenso. El brazo robot sirve para recoger regolito y rocas seleccionadas por el control de tierra que luego serán depositados en un contenedor localizado en la etapa de descenso. Al terminar las operaciones de superficie, el brazo robot introduce este contenedor en el recipiente principal de la etapa de ascenso usando cámaras para guiarse en la maniobra. Los científicos e ingenieros de la misión trabajan contrarreloj para construir una réplica del lugar del alunizaje una vez recibidas las primeras imágenes y planear así los mejores procedimientos para recoger las muestras de superficie.
La Chang’e 6 recogerá muestras mediante el taladro y el brazo robot (CASC).


El contenedor para las muestras lleva dos cilindros: un cilindro grande en el que se acumulan las muestras del taladro enrolladas y un cilindro más pequeño con las muestras recogidas en la superficie por el brazo robot (CASC).
Detalle del taladro: las muestras se acumulan enrolladas en un tubo de tela y luego se depositan en el cilindro (CASC).
Detalle del contenedor (CASC).
Debido a las limitaciones de las sesiones de las comunicaciones con el Queqiao 2 y su posición en el apoastro, la Chang’e 6 solo tendrá 14 horas para recoger las muestras en vez de las 22 horas de la Chang’e 5. Por este motivo, la Chang’e 6 incorpora un nuevo software para adaptar las instrucciones del control de tierra a las condiciones reales de la zona de aterrizaje. Pot otro lado, la misión de superficie de la Chang’e 6 está limitada por las baterías de la sonda (no lleva RTG como las Chang’e 3 y 4), las condiciones de iluminación para la navegación óptica y la elección de muestras. Está previsto que la etapa de ascenso de la Chang’e 6 despegue de la superficie lunar en la noche del 4 de junio para acoplarse luego con el segmento orbital y transferir el contenedor con muestras a la cápsula.

Satélite retransmisor Queqiao 2 (CCTV).

Detalle de la cámara rover (CNSA).

Recreación de la separación de la etapa de ascenso (CNSA).

La etapa de descenso se quedará en la superficie lunar (CASC).

La etapa de ascenso con los motores principales y los sensores estelares y solares (CASC).
China hace historia al traer a la Tierra las primeras rocas de la cara oculta de la Luna
Las rocas recuperadas pueden ayudar a los científicos a observar la evolución de la Luna y del propio sistema solar
25 junio 2024 – 08:32
China ha traído de la Luna un regalo inédito: dos kilogramos de rocas que ayudarán a resolver los misterios de la casi inexplorada cara oculta del satélite. La sonda Chang’e-6 regresó este martes transportando las primeras muestras de la superficie del hemisferio invisible desde la Tierra. Termina así con éxito un viaje completo de 53 días que representa un nuevo hito en la carrera espacial de la superpotencia asiática.
La cápsula de retorno con las muestras se separó de su módulo orbital y aterrizó en paracaídas a las 14.07 (hora local) en la estepa de Mongolia Interior, al norte de China. Las rocas recuperadas, que se enviarán ahora a un laboratorio de Pekín, pueden ayudar a los científicos a observar la evolución de la Luna y del propio sistema solar, además de proporcionar datos importantes para avanzar en las próximas misiones lunares. Tras un primer examen en Pekín, las autoridades chinas han asegurado que investigadores de otros países también podrán solicitar el acceso al estudio de las rocas lunares.
La misión comenzó el pasado 3 de mayo con el lanzamiento de la nave robótica a bordo de un cohete Long March 5. El 2 de junio, el módulo de aterrizaje se separó del orbitador y apuntó hacia la Cuenca Aitken del polo sur de la Luna, donde el Chang’e 6 descendió hasta un enorme un cráter (bautizado como Apolo) formado hace unos 4.000 millones de años y que se cree que podría contener agua helada.
Tras las operaciones de recogida de los dos kilogramos de muestras, la nave desplegó un pequeño rover de cinco kilos que se alejó para buscar una posición adecuada desde la que tomar una imagen en la que se ve el módulo de aterrizaje con los brazos robóticos usados para la perforación del terreno y la bandera china. Semanas después, el 21 de junio, el orbitador inició su regreso a la Tierra.
Esta ha sido la segunda misión de retorno después de que el Chang’e 5 volviera en 2020 con 1,73 kilos de material que recogió en la cara más cercana del satélite. Entonces, Pekín ya distribuyó pequeñas cantidades de estas muestras a varias instituciones internacionales. Esta semana, científicos chinos han desvelado que han identificado grafeno natural mientras estudiaban las proporciones de carbono en las muestras que trajo la sonda Chang’e 5.
Otras nueve misiones lunares han recuperado fragmentos de la Luna y los han devuelto a la Tierra, pero nunca antes se habían recolectado muestras de la cara oculta. “Existen diferencias significativas entre estas dos caras en términos de espesor de la corteza lunar, actividad volcánica y composición. Se espera que las muestras del Chang’e 6, al ser las primeras obtenidas de la cara oculta, respondan una de las preguntas científicas más fundamentales en la investigación científica lunar: ¿Qué actividad geológica es responsable de las diferencias entre las dos caras?”, señala Zongyu Yue, geólogo de la Academia de Ciencias de China en un artículo en la revista The Innovation.
Los científicos chinos dicen en esta publicación que las muestras de superficie devueltas probablemente consistirán en roca volcánica de 2,5 millones de años combinada con pequeñas cantidades de material generado por impactos de meteoritos cercanos.
“La mayor esperanza es que las muestras contengan algunos derretimientos de impacto (fragmentos generados cuando cuerpos más pequeños chocan contra la Luna) del cráter Apolo que pueden proporcionar limitaciones cruciales en el flujo de impacto temprano de la Luna”, continúa Yue. “Una vez que se obtenga esta información, no sólo ayudará a aclarar el papel de los primeros impactos de meteoritos en la evolución de la Luna, sino que también será de gran importancia en el análisis de la historia de los primeros impactos del sistema solar interior”.
Por primera vez tenemos muestras de la cara oculta de la Luna en la Tierra.
Punto de separación (amarillo) de la cápsula (CCTV).
Previamente, la cápsula se había separado del segmento orbital de la Chang’e 6 a las 05:22 UTC a unos 5000 kilómetros de distancia de la Tierra sobre el Atlántico sur. El orbitador realizó una maniobra propulsiva para evitar quemarse en la atmósfera terrestre y, a continuación, a las 05:41 UTC, la cápsula reentró a 11,2 km/s —la «segunda velocidad cósmica»— sobre la costa de la península Arábiga. La cápsula redujo su velocidad, descendió hasta los 60 kilómetros y volvió a salir de la atmósfera antes de volver a entrar a unos 7 km/s sobre la meseta tibetana. El aparato pudo controlar en todo momento la posición de su centro de gravedad para poder ajustar su trayectoria durante la doble reentrada y mantener así la deceleración por debajo de un umbral de seguridad. El paracaídas se desplegó a 10 kilómetros de altitud (primero salió el paracaídas extractor y luego el principal). La cápsula aterrizó inicialmente de lado y los equipos de rescate procedieron a colocarla en posición vertical antes de asegurarla y recogerla.

Trayectoria de reentrada doble de la Chang’e 6 (CNSA).
Trayectoria de reentrada: en rojo, separación de la cápsula. Los puntos señalan la primera reentrada, el mínimo de altitud de la primera reentrada, punto más alto entre reentradas y segunda reentrada (CCTV).

Doble reentrada de la Chang’e 6 (CASC).

 La cápsula antes del lanzamiento (CASC).
La cápsula antes del lanzamiento (CASC).
Inclinación del paracaídas y estructura del escudo térmico inferior (CASC).
La cápsula de la Chang’e 6, al igual que las de las misiones Chang’e 5 T1 y Chang’e 5, tiene una forma similar a las cápsulas tripuladas Shenzhou, aunque su tamaño es, obviamente, mucho menor. A diferencia de las Shenzhou, la cápsula no cuelga del paracaídas paralela al suelo, sino a través de un solo punto, por lo que contacta con el suelo en una posición inclinada. No obstante, la cápsula de la Chang’e 6 no va equipada con cohetes de combustible sólido como su versión tripulada. En los próximos días sabremos la cantidad precisa de muestras que ha traído la Chang’e 6, aunque se espera que sean más de 2 kg (la Chang’e 5 trajo 1,7 kg al no poder perforar el taladro hasta la profundidad máxima prevista).
La cápsula en posición horizontal (Xinhua).


Distintos tipos de material del escudo térmico (CASC).
Vista de la cápsula (Xinhua).
Misión Chang’e 6: los 1935,3 gramos de material de la cara oculta y el robot «sapo dorado»
Por Daniel Marín, el 7 julio, 2024.
La resaca del regreso de la cápsula de la misión Chang’e 6 continúa. China ha logrado llevar a cabo la misión lunar automática más compleja de la historia sin un solo problema digno de mención. Tras el aterrizaje de la cápsula el 25 de junio , la cápsula fue trasladada a Pekín, donde al día siguiente se extrajo el contenedor con las primeras muestras de la cara oculta de la Luna. No obstante, no sería hasta el 28 de junio cuando se anunció la masa de las muestras recogidas: 1935,3 gramos. La cantidad es un éxito cuantitativo con respecto a los 1731 gramos de la Chang’e 5, pero las declaraciones de los encargados de la misión, con Hu Hao a la cabeza, revelaron que el taladro fue incapaz de llegar a los 2,5 metros previstos y apenas superó el metro de profundidad, aparentemente por encontrarse con una capa de roca demasiado dura.
, la cápsula fue trasladada a Pekín, donde al día siguiente se extrajo el contenedor con las primeras muestras de la cara oculta de la Luna. No obstante, no sería hasta el 28 de junio cuando se anunció la masa de las muestras recogidas: 1935,3 gramos. La cantidad es un éxito cuantitativo con respecto a los 1731 gramos de la Chang’e 5, pero las declaraciones de los encargados de la misión, con Hu Hao a la cabeza, revelaron que el taladro fue incapaz de llegar a los 2,5 metros previstos y apenas superó el metro de profundidad, aparentemente por encontrarse con una capa de roca demasiado dura.
La cápsula de la Chang’e 6 con las muestras de la cara oculta (Weibo).
El taladro de la Chang’e 5 no llegó al metro de profundidad por problemas similares y, a raíz de este resultado, los técnicos se aseguraron de que el taladro de la Chang’e 6 podría alcanzar su profundidad máxima. El hecho de que no haya sid o así probablemente tenga que ver con suposiciones incorrectas sobre el comportamiento del regolito lunar y la dificultad de simular su mecánica en la Tierra (condiciones de gravedad, cohesión y presión diferentes). Por otro lado, el contenedor con las muestras de regolito y rocas superficiales recogidas por el brazo robot sí logró llenarse, a diferencia del de la Chang’e 5. El brazo robot llevó a cabo 8 recogidas de material frente a las 12 de la Chang’e 5, pero más profundas. En todo caso, hay cierta polémica sobre la capacidad máxima de recogida de muestras del sistema. Antes del lanzamiento de la Chang’e 5 se comentó que la combinación del brazo robot y el taladro podían recoger hasta 3 kg, aunque esta cantidad nunca se confirmó oficialmente. Para esta misión el objetivo eran 2 kg, una vez rebajadas las expectativas teniendo en cuenta las dificultades de excavar en la superficie lunar (dificultades que en su momento ya sufrieron los propios astronautas del Apolo, por cierto).
o así probablemente tenga que ver con suposiciones incorrectas sobre el comportamiento del regolito lunar y la dificultad de simular su mecánica en la Tierra (condiciones de gravedad, cohesión y presión diferentes). Por otro lado, el contenedor con las muestras de regolito y rocas superficiales recogidas por el brazo robot sí logró llenarse, a diferencia del de la Chang’e 5. El brazo robot llevó a cabo 8 recogidas de material frente a las 12 de la Chang’e 5, pero más profundas. En todo caso, hay cierta polémica sobre la capacidad máxima de recogida de muestras del sistema. Antes del lanzamiento de la Chang’e 5 se comentó que la combinación del brazo robot y el taladro podían recoger hasta 3 kg, aunque esta cantidad nunca se confirmó oficialmente. Para esta misión el objetivo eran 2 kg, una vez rebajadas las expectativas teniendo en cuenta las dificultades de excavar en la superficie lunar (dificultades que en su momento ya sufrieron los propios astronautas del Apolo, por cierto).
Problemas de excavaciones lunares aparte, 1,9 kg es una cantidad muy grande para una misión automática y China ya tiene en su poder 3,6 kg de muestras lunares. Ciertamente, muy lejos de los 382 kg de rocas lunares que trajeron las seis misiones Apolo que alunizaron, pero mucho más que los 300 gramos que trajeron las sondas soviéticas Luna 16, 20 y 24. Por comparación con otras misiones de retorno de muestras, no olvidemos que la misión de la NASA OSIRIS-REx trajo 121,6 gramos del asteroide Bennu y la sonda japonesa Hayabusa 2 recogió 5,4 gramos del asteroide Ryugu. En estas semanas también hemos sabido que el pequeño robot cámara que desplegó la Chang’e 6 para hacerse un selfie en la superficie lunar tenía nombre: Jinchan (金蟾), «sapo dorado» en mandarín, un animal de tres patas de la mitología china asociado con la fortuna y la Luna. Jinchan, de 5 kg, incorporaba cámaras en los dos lados y se podía comunicar mediante WiFi con la Chang’e 6, de forma parecida a la cámara desechable que dejó atrás el rover marciano Zhurong. Otra curiosidad de la misión que se ha dado a conocer es que la Chang’e 6 fue programada para re alizar todas sus operaciones de forma automática por si se perdía el contacto con el satélite retransmisor Queqiao 2
alizar todas sus operaciones de forma automática por si se perdía el contacto con el satélite retransmisor Queqiao 2
. Afortunadamente, no fue necesario poner en práctica este plan y las operaciones de recogida de muestras, que apenas duraron dos días, fueron dirigidas desde tierra con ayuda de un equipo reconstruyó en tierra un modelo de la superficie alrededor de la sonda para planear previamente las operaciones del brazo robot antes de enviar las instrucciones a la sonda. Jinchan también fue programado para operar de forma independiente en caso de que fallase la conexión con la Tierra.
El robot Jinchan (Xinhua).
La etapa de descenso de la Chang’e 6 —como la de la Chang’e 5— no fue diseñada para sobrevivir al daño causado por el motor de la etapa de ascenso al despegar el 3 de junio, por lo que todas las actividades de la misión debían terminar antes, incluyendo las operaciones de los instrumentos europeos que llevaba la nave (previamente se había dicho  en algunos medios chinos que seguirían funcionando tras la marcha de la etapa de ascenso hasta la noche lunar). Como ya sabemos, el instrumento sueco NILS (Negative Ions on Lunar Surface) logró detectar por primera vez iones negativos en la superficie lunar tras acumular más de tres horas de funcionamiento (de paso, NILS ha sido el primer instrumento de la ESA en operar desde la superficie de nuestro satélite), mientras que el instrumento francés DORN (Detection of Outgassing RadoN) cumplió con éxito su objetivo de detectar radón y otros isótopos radiactivos. DORN se activó el 6 de mayo camino a la Luna y, luego, una segunda vez el 17 de mayo ya en órbita lunar, donde funcionó un total de 32 horas para calibrar el instrumento. El 23 de mayo se activó una tercera vez y funcionó 111 horas. Tras el alunizaje el 1 de junio, completó sus operaciones en la superficie lunar y fue desactivado antes del despegue de la etapa superior.
en algunos medios chinos que seguirían funcionando tras la marcha de la etapa de ascenso hasta la noche lunar). Como ya sabemos, el instrumento sueco NILS (Negative Ions on Lunar Surface) logró detectar por primera vez iones negativos en la superficie lunar tras acumular más de tres horas de funcionamiento (de paso, NILS ha sido el primer instrumento de la ESA en operar desde la superficie de nuestro satélite), mientras que el instrumento francés DORN (Detection of Outgassing RadoN) cumplió con éxito su objetivo de detectar radón y otros isótopos radiactivos. DORN se activó el 6 de mayo camino a la Luna y, luego, una segunda vez el 17 de mayo ya en órbita lunar, donde funcionó un total de 32 horas para calibrar el instrumento. El 23 de mayo se activó una tercera vez y funcionó 111 horas. Tras el alunizaje el 1 de junio, completó sus operaciones en la superficie lunar y fue desactivado antes del despegue de la etapa superior.
Lugar de impacto de la etapa de ascenso (estrella roja superior izquierda), no lejos de la zona de aterrizaje de la Chang’e 4. A la derecha, la zona de alunizaje de la Chang’e 6 (CCTV).

Extracción del cilindro con las muestras (CNSA).
El cilindro con las m uestras Chang’e 6 (CNSA).
uestras Chang’e 6 (CNSA).
Con respecto a la etapa de ascenso, se estrelló intencionadamente contra la superficie alrededor del 8 de junio, unos dos días después de acoplarse con el orbitador y transferir el cilindro con las muestras a la cápsula (la hora exacta no se ha publicado). El lugar de impacto es la cara oculta, curiosamente, no muy lejos de la zona de alunizaje de la Chang’e 4 (vale la pena recordar que la Chang’e 6 tenía una órbita retrógrada, a diferencia de las Chang’e anteriores). Tras la Chang’e 6, China volverá a la Luna en 2026 y 2028 con las Chang’e 7 y 8, respectivamente. A diferencia de las dos últimas misiones, las Chang’e 7 y 8 incorporarán dos orbitadores analizarán la Luna mediante numerosos instrumentos de todo tipo (desde que la sonda Chang’e 2 abandonó la órbita lunar en junio de 2011 China no dispone de un orbitador con instrumentos científicos alrededor de nuestro satélite). Además, las dos sondas incorporan sondas de aterrizaje que se posarán en el polo sur y llevarán rovers y « saltadores» capaces de explorar los cráteres en sombra permanente de forma directa. Pero antes de que despegue la Chang’e 7 en 2026, China lanzará el año que viene la misión de retorno de muestras de un asteroide Tianwen 2. En cuanto a las muestras de la Chang’e 6, ahora comienza su proceso de análisis, que durará años. China ya ha anunciado su intención de repartir algunas muestras con otras naciones con las que mantienen relaciones en el ámbito espacial. El administrador de la NASA Bill Nelson ha declarado su interés por la oferta, aunque ahora está por ver si el Congreso estadounidense permite esta colaboración.
saltadores» capaces de explorar los cráteres en sombra permanente de forma directa. Pero antes de que despegue la Chang’e 7 en 2026, China lanzará el año que viene la misión de retorno de muestras de un asteroide Tianwen 2. En cuanto a las muestras de la Chang’e 6, ahora comienza su proceso de análisis, que durará años. China ya ha anunciado su intención de repartir algunas muestras con otras naciones con las que mantienen relaciones en el ámbito espacial. El administrador de la NASA Bill Nelson ha declarado su interés por la oferta, aunque ahora está por ver si el Congreso estadounidense permite esta colaboración.
Contenedor donde se guarda el cilindro con las muestras (CNSA).
Euclid
Euclid
Telescopio espacial europeo para estudiar la energía y materia oscuras
¿De qué está hecho el Universo? ¿Cuál será su futuro? Pocas preguntas hay más trascendentales que estas, pero tenemos la inmensa suerte de vivir en una época de la historia de la humanidad en la que podemos dar respuesta a las mismas. Sin embargo, todavía hay muchas cosas acerca de la estructura y evolución del Universo a gran escala que desconocemos, especialmente con respecto a la materia y energía oscuras. Y para ayudarnos a resolver estos misterios ha sido lanzado el telescopio espacial Euclid de la Agencia Espacial Europea (ESA), una de las misiones más fascinantes de los últimos años. El 1 de julio de 2023 a las 15:12 UTC despegó un Falcon 9 Block 5 desde la rampa SLC-40 de la base de la Fuerza Espacial en Cabo Cañaveral de Florida (CCSFS) con el telescopio espacial Euclid. Tras un lanzamiento impecable, Euclid fue colocado en una trayectoria directa hacia el punto de Lagrange L2 del sistema Tierra-Sol.
Datos
Tipo de misión: Observatorio espacial
Operador: ESA
Coste: 1 400 000 000 €
Nº. SATCAT: 57209
ID NSSDCA: 2023-092A
Página web: enlace
Duración planificada: 6 años (nominal)
Duración de la misión: 10 meses, 3 semanas y 1 día (327 días)
Propiedades de la nave
Fabricante: Thales Alenia Space (principal) Airbus Defence and Space (módulo de carga)1
Masa de lanzamiento: 1960 kg2
Comienzo de la misión
Lanzamiento: 1 de julio de 2023, 15:12 UTC
Vehículo: Falcon 9
Lugar: Cabo Cañaveral, SLC-40
Contratista: SpaceX
Parámetros orbitales
Sistema de referencia: Sol-Tierra L23
Altitud del periastro: 1 000 000 km
Altitud del apoastro: 1 500 000 km
Carga
Tipo: telescopio Korsch
Diámetro: 1.2 m
Longitud focal: 24.5 m
Resolución: 0,1 arcsec (visible) 0,3 arcsec (infrarrojo cercano)
Transpondedores
Banda: banda X (soporte TT&C) banda K (adquisición de datos)
Frecuencia: 8,0–8,4 GHz (banda X) 25,5–27 GHz (banda K)
Ancho de banda: pocos kbit/s descendente & ascendente (banda S) 55 Mbit/s (banda K)
Telescopio espacial Euclid (ESA).
Euclid —Euclides en español— es un telescopio espacial con un espejo primario de 1,2 metros de diámetro que observará el Universo para estudiar la materia y energía oscuras. Su objetivo es levantar un mapa tridimensional de la posición y masa de las galaxias para así determinar la composición precisa del cosmos, es decir, cuál es la proporción de energía oscura y materia oscuras. A partir de estos datos podremos conocer con mayor precisión el destino del Universo y entender mejor su origen. Pero investigar dos elementos del Universo que, por definición, son invisbles no será fácil. Euclid no es un telescopio espacial destinado a observar objetos concretos, sino que su misión es levantar un mapa de casi un tercio de todo el cielo (36% de la bóveda celeste, unos 15000 grados cuadrados) para cartografiar la posición de 35 millones de galaxias (!) midiendo su corrimiento al rojo. Asimismo, Euclid analizará las imágenes de cúmulos de galaxias en busca de la distorsión de sus formas por efecto de lentes gravitacionales débiles, un efecto causado por la curvatura del espacio-tiempo debida a la presencia otros objetos masivos más cercanos en la línea de visión.
Épocas del Universo que estudiará Euclid midiendo corrimientos al rojo con el instrumento NISP (en azul) y estudiando la deformación de la forma de las galaxias con el instrumento VIS (verde) (ESA).
Este efecto de lentes gravitacionales débiles, una consecuencia de la Relatividad General de Einstein, depende de la masa de objetos y galaxias más cercanos, por lo que Euclid será capaz de hacer un mapa tridimensional no solo de la posición de las galaxias, sino de la distribución de la masa a gran escala. Este mapa servirá a su vez para calcular la proporción de materia oscura y materia bariónica (materia «normal») presente en estas galaxias. Con respecto a la energía oscura, Euclid intentará medir los efectos de las oscilaciones acústicas bariónicas (BAO) en la distribución de galaxias lejanas con el fin de compararlos co n los observados en el fondo cósmico de microondas por misiones anteriores como Planck. De esta forma se podrán medir con precisión los efectos de la energía oscura en la aceleración del Universo y determinar si su valor ha sido constante desde el Big Bang —o sea, si es la constante cosmológica con valor w = -1— o ha variado con el tiempo.
n los observados en el fondo cósmico de microondas por misiones anteriores como Planck. De esta forma se podrán medir con precisión los efectos de la energía oscura en la aceleración del Universo y determinar si su valor ha sido constante desde el Big Bang —o sea, si es la constante cosmológica con valor w = -1— o ha variado con el tiempo.
Euclid antes del lanzamiento (ESA).

El módulo PLM de Euclid (ESA).

Distintos elementos de Euclid (ESA).
Euclid es una nave de unos 2200 kg (1921 kg en seco) construida por Thales Alenia Space como contratista principal para la ESA. Tiene unas dimensiones de 4,5 x 3,74 metros y está dividida en dos módulos, el módulo de servicio SVM (Service Module) —con los sistemas de comunicaciones, aviónica, propulsores, etc.— y el módulo PLM (Payload Module) con la óptica del telescopio y los dos instrumentos científicos. Para controlar su posición, Euclid incluye diez pares de propulsores a base de hidrazina de 20 newton de empuje y seis pares  de micropropulsores de nitrógeno gaseoso con un empuje de 1 a 1000 micronewton que garantizan una estabilidad en el apuntado de 75 milisegundos de arco durante 700 segundos (estos propulsores están basados en los empleados en la misión Gaia). Para conocer su posición, Euclid lleva una unidad de medida inercial (IMU) con giróscopos y 4 acelerómetros, así como 4 sensores solares y 3 sensores estelares. Cuatro volantes de reacción moverán la nave siempre que sea posible para llevar a cabo las sesiones de observación. Los propulsores de hidrazina se usarán para las maniobras de corrección de trayectoria.
de micropropulsores de nitrógeno gaseoso con un empuje de 1 a 1000 micronewton que garantizan una estabilidad en el apuntado de 75 milisegundos de arco durante 700 segundos (estos propulsores están basados en los empleados en la misión Gaia). Para conocer su posición, Euclid lleva una unidad de medida inercial (IMU) con giróscopos y 4 acelerómetros, así como 4 sensores solares y 3 sensores estelares. Cuatro volantes de reacción moverán la nave siempre que sea posible para llevar a cabo las sesiones de observación. Los propulsores de hidrazina se usarán para las maniobras de corrección de trayectoria.
Partes de Euclid (ESA).

Partes del módulo SVM y los paneles solares (ESA).

Módulo PLM con el telescopio y los instrumentos (ESA).

Posición de los propulsores y otros elementos de Euclid (ESA).
Los paneles solares están unidos al módulo SVM y forman el elemento PVA (PhotoVoltaic Assembly), que también sirve como parasol para mantener las bajas temperaturas necesarias para el buen funcionamiento de los instrumentos. Los paneles solares de arseniuro de galio cubren una superficie de 11 metros cuadrados y generarán entre 1800 y 2500 vatios. Puesto que Euclid solo puede alcanzar un ángulo de 121º con el Sol con respecto al eje del telescopio, el ángulo de los paneles con el Sol estará entre 0º y 33º. Los paneles alimentan una batería de celdas VES16 de ion litio desarrollada por la empresa francesa Saft.
Instalación del módulo PVA con paneles solares (ESA).
Paneles solares de Euclid y antena de alta ganancia (ESA).
Euclid estudiará el cosmos desde una órbita de halo de 90 000 x 100 000 kilómetros alrededor del punto de Lagrange L2 del sistema Tierra-Sol (ESL-2), a 1,5 millones de kilómetros de nuestro planeta, una zona en la que se encuentran otros observatorios astronómicos como el James Webb de la NASA. El punto L2 es ideal para mantener un entorno térmico estable y garantizar largas sesiones de comunicaciones. La misión primaria debe durar seis años. Euclid tardará un mes aproximadamente en llegar a L2 y para ello necesitará efectuar una maniobra de corrección de la trayectoria y dos para colocarse en la órbita de halo. Luego realizará una maniobra de corrección de la órbita una vez al mes, aproximadamente (las órbitas de halo alrededor de los puntos L1 y L2 son intrínsecamente inestables). Dos semanas después del lanzamiento, Euclid se habrá enfriado a la temperatura adecuada para que puedan funcionar sus instrumentos. Euclid tardará un mes en llegar a L2, pero necesitará unos dos meses adicionales de calibrado de instrumentos y puesta a punto antes de empezar con las operaciones científicas.

La óptica de Euclid consiste en un telescopio de tipo Korsch de tres espejos con un primario de 1,2 metros de diámetro. Airbus Defence and Space ha estado a cargo de la construcción del telescopio, que estará enfriado a 125 kelvin de forma pasiva. El diseño Korsch permite que la óptica sea compacta y estable desde el punto de vista térmico al mismo tiempo que se minimiza la dispersión de luz dentro del tubo.

Telescopio de Euclid (Airbus DS).
Partes del telescopio (Airbus DS).

Espejo primario y secundario de Euclid (ESA).

El telescopio con el tubo (Airbus DS).
Euclid cuenta con dos instrumentos principales, la cámara VIS (Visible Imager) y el espectrómetro NISP (Near Infrared Spectrum Photometer). VIS opera en el visible y NISP en el infrarrojo cercano. Inicialmente ambos instrumentos se propusieron para dos misiones diferentes, pero se unieron tras incluir una placa dicroica a la óptica capaz de dejar pasar la luz infrarroja y reflejar la visible, permitiendo su uso con un único telescopio. VIS tiene un campo de visión de 0,557º cuadrados, lo que significa que en apenas dos días de observaciones habrá cubierto más porcentaje de la bóveda celeste que el Hubble desde que se l anzó. VIS opera en el rango de 550 a 920 nanómetros y tiene una resolución de 0,1-0,2 segundos de arco. Dispone de 36 sensores CCD de 600 megapíxeles con un área de 877 centímetros cuadrados. Generará unos 520 Gbits de datos al día. VIS es una cámara pancromática, esto es, sus imágenes serán en ‘blanco y negro’.
anzó. VIS opera en el rango de 550 a 920 nanómetros y tiene una resolución de 0,1-0,2 segundos de arco. Dispone de 36 sensores CCD de 600 megapíxeles con un área de 877 centímetros cuadrados. Generará unos 520 Gbits de datos al día. VIS es una cámara pancromática, esto es, sus imágenes serán en ‘blanco y negro’.
Localización de los instrumentos VIS y NISP en el módulo PLM (ESA).

Instrumento NISP (ESA).

Rueda de filtros del instrumento NISP, construida en España (ICECSIC/IEEC/IFAE).

Por su parte, NISP es un instrumento de 158 kg capaz de realizar fotometría y espectroscopía en el infrarrojo cercano (920 a 2000 nanómetros), por lo que podrá observar galaxias más lejanas. Su resolución es de 0,3 segundos de arco y su campo de visión es de 0,55º cuadrados. Dispone de tres filtros para fotometría y de dos ‘grismas’ para espectroscopía de baja resolución (R = 380). NISP tiene 16 sensores de telururo de mercurio y cadmio (HgCdTe) de 65 megapíxel. Los filtros de NISP están situados en la rueda FWA (Filter Wheel Assembly), un elemento construido por el Instituto de Ciencias del Espacio del CSIC en España (ICE-CSIC) en colaboración con el IEEC (Institut d’Estudis Espacials de Catalunya) y el IFAE (Institut de Física d’Altes Energies). Por otro lado, La Universidad Politécnica de Cartagena (UPCT) y el Instituto de Astrofísica de Canarias (IAC) han sido responsables del diseño, construcción y validación de la electrónica de control del Instrumento NISP. VIS y NISP están refrigerados de forma pasiva hasta los 150 y 95 kelvin, respectivamente (la menor temperatura de NISP es necesaria para observar en el infrarrojo).
Instrumentos de Euclid (ESA).
Ambos instrumentos observarán doce mil millones de galaxias (!!) en el estudio WES (Wide Extragalactic Survey) que cubrirá un tercio del cielo. De todas estas, se obtendrá información detallada de la forma de 1500 millones de galaxias, y también se calculará su distancia de forma no muy precisa mediante la medición de corrimiento al rojo por fotometría en visible e infrarrojo cercano. De este subconjunto, Euclid podrá medir el corrimiento al rojo con precisión mediante espectroscopia de unos 35 millones de galaxias, lo que permitirá determinar su posición con exactitud. Además de realizar un mapa del 36% del cielo, la misión observará en profundidad dos zonas de 10º a 20º cuadrados situadas cerca de cada polo galáctico con el objetivo de llevar a cabo observaciones de precisión de las formas de 1,5 millones de galaxias y el corrimiento al rojo de 150 000. Estas observaciones de campo profundo se denominan, lógicamente, DS (Deep Surveys). Euclid evitará el ecuador galáctico y las nubes de Magallanes porque se trata de zonas con demasiadas estrellas, polvo y gas de nuestra galaxia que interferirían con las observaciones. Tampoco podrá observar el plano de la eclíptica por culpa de la presencia de la luz zodiacal.
Método de observación de Euclid (ESA).
Euclid analizará la energía oscura mediante el estudio de la historia de la expansión del Universo desde que tenía unos 3000 millones de años hasta que tenía una edad de diez mil millones —actualmente tiene 13800 millones de años— (o sea, usando galaxias con corrimientos al rojo, z, de entre 0,7 y 2). Con estos datos se intentará determinar si la energía oscura es constante (w = -1) o dinámica, un resultado que tendría importantes implicaciones para el futuro del Universo y nos ayudaría a determinar la naturaleza de la energía oscura. Con respecto a la materia oscura, Euclid podrá detectar su presencia en los halos galácticos de más de cien millones de masas solares y será capaz de estudiar cómo se distribuye esta misteriosa sustancia en los halos. Estos datos servirán de paso para medir la suma de las masas de los tipos de neutrinos y determinar cuántas familias de neutrinos existen.
Se espera que al final de sus seis años de vida útil Euclid haya generado unos 100 petabytes de datos (!!!). Las comunicaciones con Euclid se realizarán en sesiones de 4 horas al día a través de la las antenas de espacio profundo de la ESA en España y Australia, que enviarán unos 850 Gbit de datos al día al centro de operaciones de la misión, el ESOC de Darmstadt (Al emania), y de ahí al centro de operaciones científicas, el ESAC de España. Euclid fue seleccionada en 2012 como la segunda misión de tipo medio (M2) de la ESA (Solar Orbiter fue la M1 y PLATO será la M3). Se decidió bautizarla con el nombre de Euclides, el famoso matemático griego padre de la geometría, porque la misión nos aclarará cuál es la geometría del Universo a gran escala (sería gracioso que al final la geometría del Universo fuese no euclidea). Un total de 80 empresas europeas participan en Euclid, 9 de ellas españolas: Airbus España, Crisa, Alter Technology, Deimos Space, Naviar, Sener, GTD y Thales Alenia Space España. Euclid ha costado unos 1400 millones de euros.
emania), y de ahí al centro de operaciones científicas, el ESAC de España. Euclid fue seleccionada en 2012 como la segunda misión de tipo medio (M2) de la ESA (Solar Orbiter fue la M1 y PLATO será la M3). Se decidió bautizarla con el nombre de Euclides, el famoso matemático griego padre de la geometría, porque la misión nos aclarará cuál es la geometría del Universo a gran escala (sería gracioso que al final la geometría del Universo fuese no euclidea). Un total de 80 empresas europeas participan en Euclid, 9 de ellas españolas: Airbus España, Crisa, Alter Technology, Deimos Space, Naviar, Sener, GTD y Thales Alenia Space España. Euclid ha costado unos 1400 millones de euros.
Emblema de Euclid (ESA).
Euclid complementará a telescopios terrestres de campo amplio como el Vera Rubin (LSST) y al futuro telescopio espacial Nancy Grace Roman (WFIRST) de la NASA. El telescopio Roman usará un espejo principal de 2,4 metros, similar al del Hubble y más grande que el de Euclid, pero solo observará una zona del cielo  de 2000 grados cuadrados. A cambio, Roman también usará observaciones de supernovas de Tipo Ia para medir la expansión del Universo y la energía oscura. Con respecto a los telescopios terrestes, los investigadores de Euclid deberán combinar las imágenes a color de estos observatorios con las imágenes en blanco y negro obtenidas por Euclid para medir la distorsión de las galaxias debido al efecto de lente débil. Los primeros resultados de Euclid se publicarán en 2025, aunque habrá que esperar a 2030 para disponer de los resultados tras cumplir la misión primaria de seis años.
de 2000 grados cuadrados. A cambio, Roman también usará observaciones de supernovas de Tipo Ia para medir la expansión del Universo y la energía oscura. Con respecto a los telescopios terrestes, los investigadores de Euclid deberán combinar las imágenes a color de estos observatorios con las imágenes en blanco y negro obtenidas por Euclid para medir la distorsión de las galaxias debido al efecto de lente débil. Los primeros resultados de Euclid se publicarán en 2025, aunque habrá que esperar a 2030 para disponer de los resultados tras cumplir la misión primaria de seis años.
Traslado en barco (ESA).
Originalmente estaba previsto lazar Euclid en mayo de 2021 mediante un cohete ruso Soyuz desde la Guayana Francesa, pero la fecha se retrasó a 2022. Por desgracia, la invasión de Ucrania por parte de Rusia y la posterior suspensión de relaciones a todos los niveles entre la ESA y este país obligaron a retrasar una vez más el lanzamiento y buscar un vehículo alternativo. El Ariane 5 no era una opción debido a que sus últimas misiones ya estaban reservadas y el Ariane 6 no estará listo, con suerte, hasta mediados de 2024. Como resultado, la ESA se vio obligada a recurrir a un proveedor no europeo y se eligió el Falcon 9 de SpaceX por su precio y disponibilidad de fechas. Ahora, Euclid ya está rumbo a L2. ¿Qué sorpresas nos descubrirá este maravilloso instrumento?
era una opción debido a que sus últimas misiones ya estaban reservadas y el Ariane 6 no estará listo, con suerte, hasta mediados de 2024. Como resultado, la ESA se vio obligada a recurrir a un proveedor no europeo y se eligió el Falcon 9 de SpaceX por su precio y disponibilidad de fechas. Ahora, Euclid ya está rumbo a L2. ¿Qué sorpresas nos descubrirá este maravilloso instrumento?

La nave espacial y las comunicaciones estarán bajo el control del ESOC (Centro Europeo de Operaciones Espaciales). Para hacer frente a la inmensa cantidad de datos que obtendrá Euclid se ha mejorado la red Estrack de antenas del espacio profundo de la ESA. Estos datos serán analizados por el consorcio Euclid, un grupo de más de 2000 científicos provenientes de más de 300 institutos de Europa, EE. UU., Canadá y Japón.
Traslado para integración con el lanzador (ESA).
A medida que avance la misión, el tesoro oculto de datos de Euclid se transmitirá con una cadencia anual y estará disponible para la comunidad científica global a través del archivo científico alojado en el Centro Europeo de Astronomía Espacial (ESAC) de la ESA que se encuentra en España.
«Este es un gran momento para la ciencia que hemos estado esperando con gran interés durante mucho tiempo: el lanzamiento de Euclid, en una misión para descifrar el enigma de la materia oscura y la energía oscura», afirma René Laureijs, científico del proyecto Euclid de la ESA. «El gran misterio de los constituyentes fundamentales del universo se encuentra ante nuestros ojos y nos ofrece un desafío formidable. Gracias a su avanzado telescopio y a sus potentes instrumentos científicos, Euclid está preparado para ayudarnos a desvelar este misterio».
Lanzamiento de Euclid (SpaceX).
Viaje al punto de Lagrange 2




Basándose en las estimaciones realizadas hasta ahora, los cosmólogos creen que el universo está compuesto por un 5% de materia visible u ordinaria (como la materia de la que estamos hechos), mientras que la materia oscura ocuparía el 25% y la energía oscura, un 70%. Esta materia y energía oscuras afectan al movimiento y la distribución de las fuentes visibles, como las galaxias, pero no emiten o absorben luz. Por ello, los científicos no han podido determinar qué son. Comprender su naturaleza es por tanto uno de los mayores desafíos de la cosmología.
Desde España participan el Instituto de Ciencias del Espacio en Barcelona (ICE-CSIC), el Instituto de Estudios Espaciales de Cataluña (IEEC), el Instituto de Física de Altas Energías (IFAE), la Universidad Politécnica de Cartagena (UPCT) y el Instituto de Astrofísica de Canarias (IAC).
“La transferencia del gran volumen de datos que Euclid va a recabar durante los seis años que dure la misión se va a hacer a través de un sistema de comunicación muy sofisticado, desarrollado por Thales Alenia, en el que se descargarán unas 150.000 imágenes de alta resolución a lo largo de seis años“, señala Susana Infante, Jefa de proyecto del Subsistema de comunicación de Euclid en Thales Alenia Space España. Thales Alenia Space italia es el contratista principal de ese consorcio industrial que ha fabricado Euclid, con Airbus como segundo contratista, y al que contribuyen otras 80 empresas, entre ellas la españolas Alter Technology, Crisa, Deimos Space, GTD, Navair, Sener y Thales Alenia Space España. “Las empresas de nuestro país se han llevado el 10% del valor del contrato y es algo de lo que tenemos que sentirnos orgullosos”, dice Infante.
Además de la transferencia del gran volumen de datos, esta misión presenta varios retos tecnológicos: “Va a observar el 35% de la esfera celeste, algo nunca visto hasta ahora, y para ello es necesario un telescopio de altísima calidad óptica y un amplio campo de visión. Además, la plataforma tiene que ser estable durante todo el tiempo de la captura de datos. Eso unido a que tenga un apuntamiento ágil para optimizar el tiempo de observación va a ser uno de los retos principales”, resume esta ingeniera.
Euclid es una misión de tipo “M”, y parte del programa científico Cosmic Vision de la ESA (2015–2025). Este tipo de misiones están limitadas a un presupuesto de 500 millones de euros. La misión Euclid fue elegida en octubre de 2011, junto al Solar Orbiter, de entre varias misiones candidatas.4 Su lanzamiento tuvo lugar el 1 de julio de 2023 a las 15:12 UTC.5
Con su gran cobertura del cielo, y su catálogo de miles de millones de estrellas y galaxias, el valor científico de los datos obtenidos por la misión sobrepasan el ámbito de la cosmología. Esta base de datos proveerá a la comunidad astronómica con abundante información para las futuras misiones como JWST, E-ELT, TMT, ALMA, SKA o LSST.
Las primeras fotos del telescopio europeo Euclid no solo son hermosas: contienen detalles nunca vistos del universo
23 Mayo 2024
Matías S. Zavia
El telescopio espacial Euclid de la ESA ya está haciendo ciencia desde el punto L2 de Lagrange, a un millón y medio de kilómetros de la Tierra.
La Agencia Espacial Europea ha publicado hoy las cinco primeras fotos tomadas por Euclid como parte de su misión científica, que se suman a las imágenes que usó el equipo de misión para calibrar el telescopio.
Estas cinco fotos no solo son hermosas, sino también un vistazo sin precedentes del universo que ha servido como materia prima para 10 artículos científicos de próxima publicación. ¡Euclid fue lanzado el 1 de julio de 2023 y ya ha ayudado a producir 10 artículos científicos!
Pero quizá lo más sorprendente sea que las cinco imágenes que vamos a ver representan apenas 24 horas de observaciones con el telescopio.
En solo un día, Euclid retrató más de 11 millones de objetos en luz visible y cinco millones más en luz infrarroja. Un aperitivo de todo el conocimiento que habilitará el nuevo telescopio espacial europeo sobre el cosmos.
El cúmulo de galaxias Abell 2390
Abell 2390 es un enorme conglomerado de galaxias similares a la Vía Láctea. En la imagen de campo completo se ven más de 50.000 galaxias con una masa combinada de 10 billones de veces la del Sol, buena parte de ella en forma de materia oscura.
Los cúmulos de galaxias como Abell 2390 son grandes depósitos de materia oscura, lo que los convierte en laboratorios astrofísicos ideales para estudiar las propiedades de esta materia invisible que, junto con la energía oscura, se cree que constituye la mayor parte del contenido del Universo. Ese es uno de los objetivos principales del telescopio Euclid.
En este recorte de la imagen original se pueden ver de cerca las lentes gravitacionales de Abell 2390, con arcos gigantes curvados que, en algunos casos, son múltiples vistas del mismo objeto distante.
La nebulosa Messier 78
La nebulosa Messier 78 (la región central y más brillante de la imagen) es una “guardería estelar”, una gigantesca nube de polvo de la que nacen estrellas. El telescopio Euclid ha logrado la imagen más amplia y profunda de esta joven región de formación estelar gracias a su cámara infrarroja.
El espectrómetro de infrarrojo cercano (NISP) de Euclid tiene un radio de visión muy grande que ha dejado al descubierto más de 300.000 nuevos objetos, así como filamentos de gas y polvo con un detalle nunca visto.
Es la primera vez que vemos objetos de tamaño subestelar en Messier 78. Normalmente quedan ocultos por las nubes oscuras de gas y polvo que Euclid es capaz de atravesar con sus instrumentos más sensibles.
El grupo de galaxias Dorado
Dorado es uno de los grupos de galaxias más nutridos del hemisferio sur. La cámara de luz visible (VIS) de Euclid ha capturado galaxias en plena fusión formando colas de marea como resultado de sus interacciones.
El grupo Dorado es mucho más joven que otros cúmulos (como Fornax), así que varias de sus galaxias aún están formando estrellas y siguen interactuando entre sí, mientras que otras muestran signos de haberse fusionado hace relativ amente poco tiempo.
amente poco tiempo.
Este conjunto de datos permite a los científicos estudiar cómo evolucionan y colisionan las galaxias a lo largo del tiempo, lo que mejora nuestros modelos cósmicos y nuestro entendimiento de cómo se forman las galaxias dentro de halos de materia oscura.
La galaxia NGC 6744
NGC 6744 es una d e las galaxias espirales más grandes fuera de nuestro entorno local. Es un ejemplo típico del tipo de galaxia que está formando la mayoría de las estrellas en el universo cercano, lo que la convierte en un arquetipo perfecto para los estudios del telescopio Euclid.
e las galaxias espirales más grandes fuera de nuestro entorno local. Es un ejemplo típico del tipo de galaxia que está formando la mayoría de las estrellas en el universo cercano, lo que la convierte en un arquetipo perfecto para los estudios del telescopio Euclid.
El campo de visión de Euclid es capaz de cubrir toda la galaxia, capturando no solo la estructura espiral a gran escala, sino también detalles en escalas pequeñas y en distintas longitudes de onda, como los carriles de polvo que emergen de sus brazos espirales.
Los científicos de Euclid están utilizando este conjunto de datos para desentrañar la física detrás de la estructura de las galaxias espirales, mapear cómo se distribuyen las diferentes poblaciones estelares en las galaxias y dónde y cómo se están formando estrellas actualmente.
El cúmulo de galaxias Abell 2764
El cúmulo de galaxias Abell 2764 (arriba a la derecha) es una región muy densa del espacio que contiene cientos de galaxias orbitando dentro de un halo de materia oscura.
En su foto, Euclid captura una variedad de objetos que incluyen muchas galaxias de fondo, cúmulos de galaxias más distantes, galaxias en interacción que arrojan corrientes de material y una bonita espiral de canto que nos permite ver la delgadez de su disco.
Esta vista completa de Abell 2764 permite a los científicos determinar el radio del cúmulo y estudiar sus bordes con galaxias lejanas.
Imágenes | ESA/Euclid/Euclid Consortium/NASA
En Xataka | El flamante telescopio espacial europeo Euclid está listo para buscar la materia oscura
OSO 3
OSO 3
OSO 3 ( Observatorio Solar en Órbita 3 ), u Tercer Observatorio Solar en Órbita [2] [3] (conocido como OSO E2 antes del lanzamiento) fue lanzado el 8 de marzo de 1967, en una órbita casi circular de altitud media de 550 km, inclinada a 33 ° al plano ecuatorial. Su grabadora de cinta a bordo falló el 28 de junio de 1968, lo que permitió solo la adquisición de datos escasos en tiempo real durante los pases de la estación a partir de entonces; los últimos datos se recibieron el 10 de noviembre de 1969. OSO 3 volvió a entrar en la atmósfera terrestre y se quemó el 4 de abril de 1982.
OSO 3
El tercer Observatorio Solar en Órbita, OSO 3, mostrando su “Vela” (superior), que lleva experimentos solares apuntando al Sol, y su “Rueda” giratoria (inferior), que lleva dos instrumentos de exploración del cielo: el UCSD de rayos X duros experimento, y el telescopio de rayos gamma del MIT
Tipo de misión: Física solar
Operador: NASA
ID COSPAR: 1967-020A
SATCAT no.: 02703
Duración de la misión: 2 años, 8 meses
Propiedades de la nave espacial
Fabricante: BBRC
Masa de lanzamiento: 281 kilogramos (619 libras)
Comienzo de la misión
Fecha de lanzamiento: 8 de marzo de 1967, 16:19:00 UTC
Cohete: Delta C
Sitio de lanzamiento: Cabo Cañaveral LC-17A
Fin de misión
Último contacto: 10 de noviembre de 1969
Fecha de descomposición: 4 de abril de 1982
Parámetros orbitales
Sistema de referencia: Geocéntrico
Régimen: tierra baja
Excentricidad: 0.002164
Altitud del perigeo: 534 kilometers (332 mi)
Altitud de apogeo: 564 kilometers (350 mi)
Inclinación: 32,87 grados
Período: 95.53 minutos
Movimiento medio: 15.07
Época: 8 de mayo de 1967, 11:19:00 UTC [1]
Como todos los satélites de la serie American Orbiting Solar Observatory (OSO), tenía dos segmentos principales: uno, la “Vela”, estaba estabilizado para mirar hacia el Sol y llevaba paneles solares y experimentos de física solar que apuntaban al Sol. La otra sección, la “Rueda”, giraba para proporcionar una estabilidad giroscópica general y también llevaba instrumentos de exploración del cielo que barrían el cielo a medida que giraba la rueda, aproximadamente cada 2 segundos.
Instrumentación
| Experimentos a bordo de OSO 3 | ||
| Nombre | Objetivo | Investigador principal |
| Rayos gamma de alta energía (> 50 MeV) | anti-solar | Kraushaar, WL , Instituto de Tecnología de Massachusetts |
| Detector de espectro de rayos cósmicos y analizador de rayos gamma | Sol , todo el cielo | Kaplon, Morton F, Universidad de Rochester |
| Experimento de radiómetro direccional | Tierra | Neel, Carr B Jr, Centro de Investigación Ames de la NASA |
| Tierra Albedo (0,32 a 0,78 µm) | Tierra | Neel, Carr B Jr, Centro de Investigación Ames de la NASA |
| Espectrómetro EUV solar de 0,1 a 40,0 nm | Sol | Neupert, Werner M, Centro de Vuelo Espacial Goddard de la NASA |
| Cámara de iones de rayos X solares de 0,8 a 1,2 nm | Sol | Teske, Richard G, Universidad de Michigan |
| Telescopio de rayos gamma solar y celeste (7,7 a 200 keV) | Sol, todo el cielo | Laurence E. Peterson Universidad de California, San Diego |
| Emisividad de radiación térmica | entorno espacial cercano a la Tierra | Neel, Carr B Jr, Centro de Investigación Ames de la NASA |
| Espectrómetro ultravioleta extremo | Sol | Hinteregger, Hans E, Laboratorio Phillips |
El Sail llevó a cabo un experimento de rayos X duros de UCSD, con un solo cristal de centelleo delgado NaI (Tl) más un fototubo encerrado en un escudo anticoincidencia CsI (Tl) en forma de obús. La resolución energética fue del 45% a 30 keV. El instrumento operaba de 7,7 a 210 keV con 6 canales. El Investigador Principal (PI) fue el Prof. Laurence E. Peterson de UCSD. de rayos gamma cósmicos (>50 MeV También en la rueda había un instrumento de estudio del cielo ) aportado por el MIT, con el IP Prof. William L. Kraushaar.
Resultados científicos
OSO-3 obtuvo extensas observaciones de rayos X duros de erupciones solares, el fondo cósmico difuso de rayos X y múltiples observaciones de Scorpius X-1, la primera observación de una fuente de rayos X extrasolar por un satélite de observación.[4] [5] [6] [7]
El instrumento de rayos gamma del MIT obtuvo la primera identificación de rayos gamma cósmicos de alta energía que emanan de fuentes galácticas y extragalácticas.[8]
Vela
Vela
Serie de Observatorios
Vela era el nombre de un grupo de satélites desarrollados como el elemento Vela Hotel del Proyecto Vela por los Estados Unidos para detectar detonaciones nucleares y monitorear el cumplimiento del Tratado de Prohibición Parcial de Pruebas de 1963 por parte de la Unión Soviética.
Satélite Vela 5B en órbita.
País de origen: Estados Unidos
Operador: Fuerza Aérea de EE. UU.
Aplicaciones: Reconocimiento
Especificaciones
Régimen: Órbita muy elíptica
Vida de diseño: 15 años
Estado: Retirado
Lanzado: 12
Operacional: 0
Retirado: 12
Lanzamiento inaugural: Vela 1A
Último lanzamiento: Vela 6B
Programa: Proyecto Vela & Integrated Operational Nuclear Detection System (IONDS).
Campo: Satélite de reconocimiento
Lanzamiento: 1963 hasta 1970
Lanzacohetes: Atlas – Agena – Titan IIIC
Fin de la misión: 1984
Duración: 15 años
Misa en el lanzamiento: de 150 a 261 kg
Vela comenzó como un programa de investigación de bajo presupuesto en 1959. Terminó 26 años después como un sistema espacial militar exitoso y rentable, que también proporcionó datos científicos sobre fuentes naturales de radiación espacial. En la década de 1970, la misión de detección nuclear fue asumida por los satélites del Programa de Apoyo a la Defensa (DSP). A fines de la década de 1980, se amplió con los satélites del Sistema de posicionamiento global (GPS) Navstar. El programa ahora se llama Sistema Operativo Integrado de Detección NuDet (Detonación Nuclear) ( IONDS).
Despliegue
Se construyeron doce satélites, seis del diseño del Vela Hotel y seis del diseño Advanced Vela. La serie Vela Hotel fue para detectar pruebas nucleares en el espacio, mientras que la serie Advanced Vela fue para detectar no solo explosiones nucleares en el espacio sino también en la atmósfera.
Todas las naves espaciales fueron fabricadas por TRW y lanzadas en pares, ya sea en un propulsor Atlas – Agena o Titan III -C. Fueron colocados en órbitas de 118.000 km (73.000 millas),[1] muy por encima de los cinturones de radiación de Van Allen. Su apogeo fue aproximadamente un tercio de la distancia a la Luna. El primer par de Vela Hotel se lanzó el 17 de octubre de 1963,[2] una semana después de que entrara en vigencia el Tratado de Prohibición Parcial de Pruebas, y el último en 1965. Tenían una vida útil de seis meses, pero solo se cerraron después de cinco años. Los pares Advanced Vela se lanzaron en 1967, 1969 y 1970. Tenían una vida útil nominal de diseño de 18 meses, que luego se cambió a siete años. Sin embargo, el último satélite que se apagó fue el Vehículo 9 en 1984, que se había lanzado en 1969 y había durado casi 15 años.
La serie Vela comenzó con el lanzamiento de Vela 1/2 el 17 de octubre de 1963, un vuelo que también marcó el viaje inaugural del vehículo Atlas-Agena SLV-3. El segundo par de satélites se lanzó el 17 de julio de 1964 y el tercero el 20 de julio de 1965. El último lanzamiento falló levemente cuando un motor vernier Atlas se apagó en el despegue, mientras que el otro nonio operaba a niveles de empuje por encima de lo normal. Esto resultó en una inclinación ligeramente más baja de lo normal para los satélites, sin embargo, la misión se llevó a cabo con éxito. El problema se debió a un mal funcionamiento de la válvula de asiento a vernier LOX.
Los satélites Vela posteriores se cambiaron al propulsor Titan IIIC debido a su mayor peso y complejidad. Se lanzaron tres conjuntos más el 28 de abril de 1967, el 23 de mayo de 1969 y el 8 de abril de 1970. El último par de satélites Vela operó hasta 1985, cuando finalmente se cerraron, la Fuerza Aérea afirmó que eran los más antiguos del mundo en funcionamiento. Permanecieron en órbita hasta su descomposición a fines de 1992.
Instrumentos
El satélite Vela- 5A / B en su sala blanca. Los dos satélites, A y B, se separaron después del lanzamiento.
5A / B en su sala blanca. Los dos satélites, A y B, se separaron después del lanzamiento.
Los satélites Vela originales estaban equipados con 12 detectores de rayos X externos y 18 detectores internos de neutrones y rayos gamma. Estaban equipados con paneles solares que generaban 90 vatios.
Los satélites Advanced Vela estaban equipados adicionalmente con dos sensores de fotodiodo de silicio sin imágenes llamados bhangmetros que monitoreaban los niveles de luz en intervalos de menos de milisegundos. Podrían determinar la ubicación de una explosión nuclear dentro de aproximadamente 3,000 millas. Las explosiones nucleares atmosféricas producen una firma única, a menudo llamada “curva de doble joroba”: un destello corto e intenso que dura alrededor de 1 milisegundo, seguido de una segunda emisión de luz mucho más prolongada y menos intensa que toma una fracción de segundo a varios segundos. El efecto se produce porque la superficie de la primera bola de fuego es rápidamente superada por la onda de choque atmosférica en expansión compuesta de gas ionizado. Aunque emite una cantidad considerable de luz en sí mismo, es opaco y evita que la bola de fuego mucho más brillante brille a través. A medida que la onda de choque se expande, se enfría y se vuelve más transparente, lo que permite que la bola de fuego mucho más caliente y brillante vuelva a ser visible.
No solo fenómeno natural se conoce la producción de esta firma, aunque se especuló con que el Velas podría grabar excepcionalmente raros eventos dobles naturales, tales como un meteoro huelga en la nave espacial que produce un destello brillante o desencadenante en un rayo Superbolt en la atmósfera de la Tierra, como pudo haber ocurrido en el incidente de Vela.[3] [4] [5]
También estaban equipados con sensores que podían detectar el pulso electromagnético de una explosión atmosférica.
Se requería energía adicional para estos instrumentos, y estos satélites más grandes consumían 120 vatios generados a partir de paneles solares. Por casualidad, los satélites Vela fueron los primeros dispositivos en detectar explosiones de rayos gamma cósmicos.
Observaciones controvertidas
Alguna controversia todavía rodea al programa Vela ya que el 22 de septiembre de 1979 el satélite Vela 5B (también conocido como Vela 10 y OPS 6911[6]) detectó el característico destello doble de una explosión nuclear atmosférica cerca de las Islas Príncipe Eduardo. Aún explicado de manera insatisfactoria, este evento se conoce como el Incidente de Vela. El presidente Jimmy Carter inicialmente consideró que el evento era evidencia de una prueba nuclear conjunta de Israel y Sudáfrica, aunque el informe ahora desclasificado de un panel científico que posteriormente nombró mientras buscaba la reelección concluyó que probablemente no fue el evento de una explosión nuclear.[cita requerida] Una explicación alternativa implica un evento magnetosférico que afecta a los instrumentos.
Un incidente anterior ocurrió cuando una intensa tormenta solar el 4 de agosto de 1972 activó el sistema en modo evento como si hubiera ocurrido una explosión, pero esto fue rápidamente resuelto por el personal que monitoreaba los datos en tiempo real. [7]
En 2018, un nuevo estudio confirmó que es muy probable que se tratara de una prueba nuclear, realizada por Israel. [8] [9]
Vela 5A y 5B
El detector de rayos X de centelleo (XC) a bordo del Vela 5A y su Vela 5B gemelo constaba de dos cristales de NaI (Tl) de 1 mm de espesor montados en tubos fotomultiplicadores y cubiertos por una ventana de berilio de 0,13 mm de espesor. Los umbrales electrónicos proporcionaron dos canales de energía, 3–12 keV y 6–12 keV.[10] Además del anuncio de rayos X de Nova indicado arriba, el detector XC a bordo del Vela 5A y 5B también descubrió y anunció la primera explosión de rayos X jamás reportada.[11] El anuncio de este descubrimiento precedió al anuncio inicial del descubrimiento de explosiones de rayos gamma en 2 años. Delante de cada cristal había un colimador de listones que proporcionaba un ancho completo a la mitad de la apertura máxima (FWHM) de ~ 6,1 × 6,1 grados. El área efectiva del detector fue de ~ 26 cm 2. Los detectores escanearon un gran círculo cada 60 segundos y cubrieron todo el cielo cada 56 horas.[12] La sensibilidad a las fuentes celestes estaba severamente limitada por el alto fondo intrínseco del detector, equivalente a aproximadamente el 80% de la señal de la Nebulosa del Cangrejo, una de las fuentes más brillantes del cielo en estas longitudes de onda.[12]
El detector de rayos X satelital Vela 5B siguió funcionando durante más de diez años.
Vela 6A y 6B
Al igual que los satélites Vela 5 anteriores, los satélites de detección de pruebas nucleares Vela 6 formaban parte de un programa dirigido conjuntamente por los Proyectos de Investigación Avanzada del Departamento de Defensa de EE. UU. Y la Comisión de Energía Atómica de EE. UU., Administrado por la Fuerza Aérea de EE. UU. Las naves espaciales gemelas, Vela 6A y 6B, se lanzaron el 8 de abril de 1970. Se utilizaron datos de los satélites Vela 6 para buscar correlaciones entre estallidos de rayos gamma y eventos de rayos X. Se encontraron al menos dos buenos candidatos, GB720514 y GB740723. Los detectores de rayos X fallaron en Vela 6B el 27 de enero de 1972 y en Vela 6A el 12 de marzo de 1972.
Papel de Vela en el descubrimiento de estallidos de rayos gamma
El 2 de julio de 1967, a las 14:19 UTC, los satélites Vela 4 y Vela 3 detectaron un destello de radiación gamma diferente a cualquier firma de armas nucleares conocida.[13] Sin saber qué había sucedido pero sin considerar el asunto particularmente urgente, el equipo del Laboratorio Científico de Los Alamos, dirigido por Ray Klebesadel, archivó los datos para su investigación. A medida que se lanzaron satélites Vela adicionales con mejores instrumentos, el equipo de Los Alamos continuó encontrando explosiones inexplicables de rayos gamma en sus datos. Al analizar los diferentes tiempos de llegada de las ráfagas detectadas por diferentes satélites, el equipo pudo determinar estimaciones aproximadas para las posiciones del cielo de dieciséis ráfagas[14] y descartar definitivamente un origen terrestre o solar. Contrariamente a la creencia popular, los datos nunca se clasificaron.[15] Después de un análisis exhaustivo, los hallazgos se publicaron en 1973 como un artículo de Astrophysical Journal titulado “Observaciones de estallidos de rayos gamma de origen cósmico”.[14] Esto alertó a la comunidad astronómica sobre la existencia de explosiones de rayos gamma (GRB), ahora reconocidos como los eventos más violentos del universo.
Lanzamientos
| Historial de lanzamiento | |||||||
| N º de pedido. | Satélite | Fecha de lanzamiento | Lanzacohetes | Masa | Instrumentos | ID de Cospar | Comentario |
| 1 | Vela 1A | 17 de octubre de 1963 | Atlas Agena -D | 150 kilogramos | 3 instrumentos | 1963-039A | |
| 2 | Vela 1B | 1963-039C | |||||
| 3 | Vela 2A | 17 de julio de 1964 | Atlas Agena -D | 150 kilogramos | 8 instrumentos | 1964-040A | |
| 4 | Vela 2B | 1964-040B | |||||
| 5 | Vela 3A | 20 de julio de 1965 | Atlas Agena -D | 150 kilogramos | 8 instrumentos | 1965-058A | |
| 6 | Vela 3B | 1965-058B | |||||
| 7 | Vela 4A | 28 de abril de 1967 | Titán -3C | 231 kilogramos | 9 instrumentos | 1967-040A | |
| 8 | Vela 4B | 1967-040B | |||||
| 9 | Vela 5A | 23 de mayo de 1969 | Titán -3C | 259 kilogramos | 8 instrumentos | 1969-046D | |
| 10 | Vela 5B | 1969-046E | |||||
| 11 | Vela 6A | 8 de abril de 1970 | Titán -3C | 261 kilogramos | 8 instrumentos | 1970-027A | |
| 12 | Vela 6B | 1970-027B | |||||
Avance del proyecto
El proyecto Vela, luego el programa del Sistema Integrado de Detección Nuclear Operativa (IONDS) lanzado por los Estados Unidos para monitorear la aplicación del Tratado de Prohibición Parcial de Ensayos Nucleares firmado en 1963, tiene tres componentes: Vela Uniform debe monitorear las señales sísmicas emitidas por un prueba nuclear subterránea, Vela Sierra detecta pruebas atmosféricas desde el suelo, mientras que Vela Hotel debe detectar las mismas pruebas desde el espacio. El Proyecto Vela es desarrollado por DARPA y supervisado por la Fuerza Aérea de los Estados Unidos . El nombre Vela se elige en referencia a la constelación de las Velas. Doce satélites, en dos subseries, son construidos por la empresa TRW. Los instrumentos están siendo desarrollados por el Laboratorio Nacional de Los Alamos, que ha adquirido experiencia en el desarrollo de detectores de rayos cósmicos y rayos gamma mediante el desarrollo de cargas útiles para cohetes de sondeo.
Despliegue
Los satélites son lanzados por parejas por lanzadores Atlas / Agena en 1963 (Vela 1), 1964 (Vela 2) y 1967 (Vela 3). Versiones posteriores más pesadas por cohetes Titan IIIC en 1967 (Vela 4), 1969 (Vela 5) y 1970 (Vela 6). Se colocan en una órbita circular alta (altitud 137.000 km) con una inclinación orbital de 36 °. Cada par circula en la misma órbita pero ocupa una posición opuesta (a 180 °) para garantizar en conjunto una vigilancia completa de la superficie del globo.
Los satélites Vela han cumplido por completo sus objetivos y también han aportado información científica que ha tenido un impacto significativo en el campo de la astronomía (viento solar, estallido de rayos gamma). Todos los satélites funcionaron al menos 10 veces más que la duración para la que fueron diseñados (6 meses). Los satélites de la versión mejorada (Vela 5 y 6) funcionaron hasta que fueron puestos voluntariamente fuera de servicio el 27 de septiembre de 1984 casi 15 años después de su lanzamiento.
Características técnicas
El satélite Vela tiene la forma de un poliedro regular de 26 lados cuyo cuerpo está cubierto de células solares que generan 120 vatios. Se estabiliza por rotación a razón de 2 revoluciones por segundo (primeras versiones) y luego 1 revolución por segundo para las versiones Vela 5 y 6. Su masa está entre 150 kg (Vela 1) y 261 kg (Vela 6). El par de satélites incluye un motor de apogeo responsable de colocar el satélite en su órbita final.
Instrumentos

Estructura interna de un satélite Vela.

Primer plano de 2 satélites Vela poco antes de su lanzamiento.
Satélites 1A a 4B
Detector de rayos x
Instrumento presente en satélites de Vela 1A
Detector de rayos gamma
Instrumento presente en satélites de Vela 1A
Detector de neutrones
Instrumento presente en satélites de Vela 1A
El detector de neutrones identifica tanto los neutrones generados por una explosión nuclear como los de origen espacial (subproductos de los rayos cósmicos, otros). Con este instrumento se midieron electrones con una energía entre 1 y 100 MeV.
Experimento de viento solar
Instrumento presente en satélites de Vela 4A
El instrumento está compuesto por 4 contadores Geiger y un analizador electrostático que permite el estudio del viento solar y los electrones de baja energía del espacio interplanetario y la cola de la magnetosfera. Se utilizaron contadores Geiger para medir el flujo y la distribución angular de electrones con energía superior a 45 keV.
Espectrómetro de electrones de protones ⇒ Analizador electrostático y tubos Geiger
Instrumento presente en los satélites Vela 2A a 3B
Medida de la distribución angular y del espectro energético de partículas en la magnetosfera y el viento solar. Un contador Geiger cuenta electrones con energía superior a 45 keV. Un analizador electrostático mide la energía de iones y electrones según una cuadrícula de 16 valores entre 0,3 y 20 keV y evalúa aproximadamente su distribución angular con respecto al Sol.
Detector de radiación de fondo
Instrumento presente en los satélites Vela 2A y 2B
Contador de rayos X de centelleador
Instrumento presente en satélites de Vela 3A
Este instrumento se utiliza para medir el flujo de rayos X emitidos por el sol. También se utiliza para medir el flujo integrado de protones entre 3 y 100 MeV.
Detector de circuito estático
Instrumento presente en satélites de Vela 2A
Este instrumento mide la intensidad, distribución, variaciones de tiempo y espectro de energía de los electrones presentes en la región de transición y en la cola de la magnetosfera. Las partículas medidas son electrones cuya energía está entre 45 y 430 keV y protones entre 180 y 570 keV. En la versión a bordo del Vela 3A, la medición toma electrones cuya energía está entre 30 y 475 keV y protones entre 180 y 570 keV. En la versión a bordo del Vela 4A, la medida transporta los electrones cuya energía está entre 30 y 700 keV.
Tubos Geiger
Instrumento presente en los satélites Vela 2A a 3B
Este detector se utiliza para analizar casos en los que el detector de circuito estático identifica electrones y protones de la misma energía.
Magnetómetro
Instrumento presente en los satélites Vela 2A a 3B
El magnetómetro mide el campo magnético en un solo eje perpendicular al eje de rotación del satélite. La sensibilidad del detector cubre el rango 0-63 gamma.
Detector de rayos X y gamma con centelleadores
Instrumento presente en satélites de Vela 4A
Detector ultravioleta extremo
Instrumento presente en satélites Vela de 3A
Telescopio de partículas energéticas de circuito sólido
Instrumento presente en satélites de Vela 4A
El instrumento incluye 4 detectores de partículas tipo semiconductor, un tubo fotomultiplicador y un centelleador anti-coincidencia con un campo óptico de 30 °. Se utiliza para medir la intensidad y dirección de protones con energía entre 0,5 y 100 MeV y núcleos alfa con energía entre 12 y 400 MeV.
Satélites 5A a 6B
Uno de los instrumentos del satélite Vela 5B.
Detector ultravioleta extremo
Dos detectores miden la radiación ultravioleta extrema emitida por el Sol respectivamente en las longitudes de onda de 30 a 150 A y 120 a 900 A. El instrumento reproduce el espectro aproximado del flujo.
Detector de rayos X solar
Telescopio de partículas solares
El instrumento se utiliza para medir la intensidad y dirección de los protones solares con energía entre 0,3 y 50 MeV y núcleos alfa solares con energía entre 2 y 100 MeV . Permite identificar y medir los flujos de núcleos de deuterio, tritiul y helio-3. El instrumento incluye 3 telescopios orientados a 45 °, 90 ° y 135 ° con respecto al eje de rotación del satélite. Cada telescopio incluye un tubo colimador con un campo óptico de 30 ° y un detector de partículas de tipo circuito sólido.
Detector de electrones
Viento solar
Rayos cósmicos
Detector de neutrones
Astronomía de rayos gamma
Historial de lanzamiento
Lanzamiento de Vela 3A y 3B por un cohete Atlas Agena -D el 20 de julio de 1965.
Resultados científicos
La primera señal de una explosión de rayos gamma registrada el 2 de julio de 1967 por un instrumento a bordo de un satélite Vela 4.
El descubrimiento de estallidos de rayos gamma
Las explosiones de rayos gamma son los fenómenos astronómicos más violentos de nuestro Universo. Se caracterizan por una emisión de rayos gamma que suele durar desde unos pocos milisegundos hasta unos minutos. La radiación gamma solo es observable directamente desde el espacio, por lo que la observación de estallidos de rayos gamma está condicionada por el desarrollo de detectores gamma a bordo de satélites artificiales. Los satélites Vela equipados con ellos para detectar pruebas nucleares son los primeros en descubrir estallidos de rayos gamma accidentalmente enjulio 1967. La primera versión de los satélites, Vela 1, tiene instrumentación de baja sensibilidad. Además, los detectores de cada satélite pueden reaccionar ante partículas cargadas de fuentes ya conocidas (rayos cósmicos emitidos por el Sol, radiación emitida por una supernova, etc.). Pero enjulio 1967, una señal que dura unos segundos con un pico doble atípico es percibida simultáneamente por los detectores de dos satélites Vela 4. Los ingenieros del Laboratorio Nacional de Los Alamos liderados por Ray Klebesadel, quienes analizan los datos proporcionados por los satélites Vela, están buscando una explicación, pero no hay ninguna tormenta solar o supernova en esta fecha. El equipo del laboratorio es consciente de que se trata de un fenómeno asombroso, pero en la medida en que los detectores no proporcionan la ubicación de la fuente o la distancia a la misma, posponen un análisis más profundo para la provisión de detectores más sensibles a bordo de las generaciones posteriores de satélites Vela. Estos fueron lanzados entre 1969 (Vela 5) y 1970 (Vela 6). Al analizar el momento preciso de detección de los estallidos de rayos gamma por los distintos satélites, los ingenieros logran por triangulación localizar el origen de dieciséis de estos fenómenos en el cielo, lo que les permite eliminar las fuentes de radiación conocidas en ese momento. (Supernova, Tierra, Luna, Sol). Los datos, que estaban cubiertos por el secreto militar debido a la naturaleza del programa Vela, fueron desclasificados en 1973 y el descubrimiento de las misteriosas señales se hizo público en un artículo escrito por el equipo de Los Alamos y publicado en el Astrophysical Journal. El nuevo fenómeno se llama “explosión de rayos gamma” o GRB (“Gamma Ray Burst”).
Los datos recogidos por los satélites Vela 5A, B, 6A y 6B permitieron identificar 73 estallidos de rayos gamma entre Julio de 1969 y Abril de 1979. Los satélites Vela 6A y B también se utilizaron para buscar correlaciones entre las explosiones de rayos gamma y las emisiones de rayos X. En dos casos (GB720514 y GB740723), se detectaron datos que parecían indicar un vínculo.
Detección de prueba nuclear
El incidente de Vela
La 22 de septiembre de 1979, un instrumento (el bhangmeter) de uno de los satélites Vela detecta un doble destello de luz (un destello corto seguido de un destello largo) considerado característico de una explosión nuclear. En el pasado, esta firma de luz detectada por un satélite Vela podría haberse asociado cada vez (en 41 casos) con una explosión nuclear real. La señal luminosa del 22 de septiembre ocurre en un área de 5.000 km de diámetro que incluye el extremo sur de África, el Océano Índico y el Atlántico Sur, así como una pequeña parte de la Antártida.
Varios hechos recientes sugieren que Sudáfrica, Israel o los dos países juntos, pueden haber querido realizar una prueba nuclear a pesar de la presión ejercida por las dos superpotencias de la época. Sin embargo, existen algunas inconsistencias entre los datos proporcionados por los dos bhangmetros redundantes instalados a bordo del satélite Vela. Dados los riesgos políticos, el gobierno de los Estados Unidos está lanzando una investigación exhaustiva para determinar si realmente se realizó una prueba y quién la realizó. Participaron numerosos organismos públicos, laboratorios y empresas externas. Se analizan los datos proporcionados por los satélites Defense Support Program (DSP), Satellite Data System (SDS) y Defense Meteorological Satellite Program (DMSP), todos los portadores de detectores capaces de identificar una explosión nuclear, así como las señales de las cadenas de boyas Sistema de vigilancia acústica de sonido (SOSUS) y Sistema de localización de impacto de misiles (MILS) responsables de monitorear los submarinos de misiles soviéticos y localizar el área de precipitación de ojivas nucleares. Las muestras de la atmósfera y la vegetación en varios países de la región son realizadas por agentes estadounidenses para buscar rastros de lluvia radiactiva. Aunque algunos laboratorios concluyen que efectivamente hubo una explosión nuclear (por ejemplo, el Laboratorio de Investigaciones Navales de la Armada de los Estados Unidos), la conclusión es que las señales detectadas probablemente fueron producto de la colisión de un micrometeorito con un satélite.
OSO
OSO
Observatorio Solar en Órbita
El Programa del Observatorio Solar en Órbita (abreviado OSO) era el nombre de una serie de telescopios espaciales estadounidenses destinados principalmente a estudiar el Sol, aunque también incluían importantes experimentos no solares. Ocho fueron lanzados con éxito a la órbita terrestre baja por la NASA entre 1962 y 1975 utilizando cohetes Delta . Su misión principal era observar un ciclo de manchas solares de 11 años en espectros de rayos X y UV. Los siete iniciales (OSO 1–7) fueron construidos por Ball Aerospace, entonces conocida como Ball Brothers Research Corporation (BBRC), en Boulder, Colorado.[1] OSO 8 fue construido por Hughes Space and Communications Company, en Culver City, California.

OSO 4
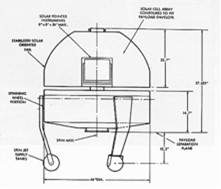
Diagrama del observatorio solar en órbita

Un cohete Delta lanzando OSO 8 el 21 de junio de 1975, en Cabo Cañaveral, Florida
Historia
El diseño básico de toda la serie presentaba una sección giratoria, la “Rueda”, para proporcionar estabilidad giroscópica. Una segunda sección, la “Vela”, fue impulsada eléctricamente contra la rotación de la Rueda y estabilizada para apuntar al Sol. El Sail llevaba instrumentos solares puntiagudos y también el conjunto de células solares fotovoltaicas que alimentaban la nave espacial. El cojinete crítico entre la rueda y la vela fue una característica importante del diseño, ya que tenía que funcionar sin problemas durante meses en el duro vacío del espacio sin la lubricación normal. También transportaba la energía de la Vela y los datos de los instrumentos solares puntiagudos a la Rueda, donde se ubicaban la mayoría de las funciones de la nave espacial. Los instrumentos científicos adicionales también podrían ubicarse en la Rueda,
OSO B sufrió un incidente durante las actividades de integración y verificación el 14 de abril de 1964. El satélite estaba dentro de la instalación de prueba de giro en Cabo Cañaveral conectado a la tercera etapa de su impulsor Delta C cuando un técnico encendió accidentalmente el impulsor a través de electricidad estática. El motor de la tercera etapa se activó, se lanzó a sí mismo y al satélite hacia el techo y rebotó en un rincón de la instalación hasta que se quemó. Tres técnicos murieron calcinados. El satélite, aunque dañado, pudo repararse utilizando una combinación de piezas prototipo, repuestos de vuelo y componentes nuevos. Fue lanzado diez meses después, el 3 de febrero de 1965, y fue designado OSO 2 en órbita.[2]
OSO C nunca llegó a la órbita. El despegue tuvo lugar el 25 de agosto de 1965 y todo salió bien durante la quema de la segunda etapa. Durante la fase de inercia previa a la separación de la tercera etapa, su motor cohete se encendió prematuramente. Esto se registró en las lecturas en tierra como una perturbación de actitud seguida de la pérdida de la telemetría de la segunda etapa, y aunque la tercera etapa logró separarse, sufrió una caída del 18% en el empuje. La nave espacial OSO no pudo alcanzar la velocidad orbital y, en cambio, volvió a caer a la atmósfera y se quemó. Se sospechó que la falla fue causada por una modificación en el mecanismo de encendido en la tercera etapa después de algunas dificultades técnicas menores experimentadas en el lanzamiento anterior de Delta C (TIROS 10 el 2 de julio).[3]
| Designacion | Fecha de lanzamiento | fecha de reingreso | Resultados notables |
| OSO 1 (OSO A) | 7 de marzo de 1962 | 7 de octubre de 1981 [4] | |
| OSO 2 (OSO B2) | 3 de febrero de 1965 | 8 de agosto de 1989 [5] | |
| OSO 3 (OSO E1) | 8 de marzo de 1967 | 4 de abril de 1982 [6] | Se observaron llamaradas solares del Sol, así como una llamarada de Scorpius X-1 [7] [8] |
| OSO 4 (OSO D) | 18 de octubre de 1967 | 14 de junio de 1982 [9] | |
| OSO 5 (OSO F) | 22 de enero de 1969 | 2 de abril de 1984 [10] | Radiación difusa de rayos X de fondo medida de 14 a 200 keV [11] [12] |
| OSO 6 (OSO G) | 9 de agosto de 1969 | 7 de marzo de 1981 [13] | Observó tres instancias de coincidencias de rayos X duros con estallidos de rayos gamma. [14] |
| OSO 7 (OSO H) | 29 de septiembre de 1971 | 8 de julio de 1974 [15] | Erupciones solares observadas en el espectro de rayos gamma. Los datos recopilados permitieron la identificación de Vela X-1 como un binario de rayos X de alta masa. [16] [17] |
| OSO 8 (OSO I) | 21 de junio de 1975 | 8 de julio de 1986 [18] | Encontró una línea de emisión de hierro en el espectro de rayos X de un cúmulo de galaxias. [19] |
El programa del Observatorio Solar en Órbita Avanzada (AOSO) se desarrolló a mediados de la década de 1960 como una versión más avanzada de la serie OSO. Concebida como un sistema de satélites en órbita polar, esta nave espacial monitorearía continuamente el Sol y el entorno circundante con detectores e imágenes electrónicas que van desde rayos X hasta luz visual. Debido a restricciones presupuestarias, el programa AOSO se canceló en 1965. En cambio, fue reemplazado por los satélites OSO-I, OSO-J y OSO-K. Solo se lanzó OSO-I, que se convirtió en OSO 8.[20]
Se desarrolló y lanzó otro satélite que utiliza la plataforma Orbiting Solar Observatory: el satélite Solwind. Fue lanzado el 24 de febrero de 1979. Fue operado por el Programa de prueba espacial del Departamento de Defensa. Fue destruido el 13 de septiembre de 1985 en una prueba de misiles ASAT.
OSO 1
Descripción general de la misión
El primero de una serie de 8 observatorios solares en órbita lanzados con éxito (OSO 1) se lanzó el 7 de marzo de 1962. La nave espacial de 200 kg tenía una sección de rueda giratoria de 9 lados de 1,2 m de diámetro unida a una sección de vela en forma de abanico. Se puso en una órbita aproximadamente circular a ~ 575 km de altitud, 32,8 grados de inclinación. Los principales objetivos de su misión eran medir la radiación electromagnética solar en las regiones de rayos ultravioleta, rayos X y rayos gamma. En segundo lugar, fue para investigar las partículas de polvo en el espacio. La transmisión de datos finalizó el 6 de agosto de 1963. El satélite volvió a entrar en la atmósfera terrestre el 8 de octubre de 1981.
Instrumentación

Hubo una serie de experimentos de rayos X y rayos gamma a bordo de OSO 1 para realizar observaciones solares. Sin embargo, un instrumento, el Experimento de rayos gamma de la Universidad de Minnesota, fue diseñado para proporcionar mediciones preliminares de la intensidad y las propiedades direccionales de los rayos gamma de baja energía en el espacio. El detector operó en el rango de 50 keV – 3 MeV. Para el rango de 50-150 keV, un cristal de centelleo de NaI(Tl) monitoreaba la radiación a través de un escudo de plomo. El detector que opera en las regiones de energía de 0,3-1,0 MeV y 1,0-3,0 MeV utilizó dos centelleadores conectados como un telescopio de coincidencia Compton.
Ciencias
El experimento de rayos gamma de la Universidad de Minnesota en OSO 1 produjo una medida del flujo de rayos gamma extraterrestres entre 0,5 y 3,0 MeV y una indicación de su origen en la esfera celeste. Igualmente importante, este experimento comenzó a definir los problemas de fondo encontrados en la astronomía de rayos gamma.
Saber más:
Pragyan (rover)
Pragyan (rover)
Pragyan montado en la rampa del módulo de aterrizaje Chandrayaan-2
Tipo de misión: vehículo lunar
Operador: ISRO
Duración de la misión
- Chandrayaan-2 : 0 días (fallo en el aterrizaje)
- Chandrayaan-3 : 2 días (transcurridos)
By Indian Space Research Organisation (GODL-India), GODL-India, https://commons.wikimedia.org/w/index.php?curid=135856753
Propiedades de la nave espacial
Fabricante: ISRO
Masa de aterrizaje
- Chandrayaan-2: 27 kg (60 libras)
- Chandrayaan-3: 26 kg (57 libras)
Dimensiones: 0,9 m × 0,75 m × 0,85 m (3,0 pies × 2,5 pies × 2,8 pies)
Fuerza: 50 W de paneles solares
Inicio de la misión
Fecha de lanzamiento
- Chandrayaan-2: 22 de julio de 2019 14:43:12 IST (09:13:12 UTC )
- Chandrayaan-3: 14 de julio de 2023 14:35 IST (09:05 UTC) [1]
Sitio de lanzamiento: SDSC Segunda plataforma de lanzamiento .Centro Espacial Satish Dhawan en Sriharikota de Andhra Pradesh el 14 de julio.
Contratista: ISRO
Implementado desde: Vikram
Fecha de implementación
Chandrayaan-2: previsto: 7 de septiembre de 2019 [2]
Resultado: Nunca desplegado desde un módulo de aterrizaje destruido. [3]
Chandrayaan-3: 23 de agosto de 2023 [4]
Vehículo lunar
Fecha de aterrizaje: 6 de septiembre de 2019, 20:00; 21:00 UTC [5]
Lugar de aterrizaje
Intento: 70.90267°S 22.78110°E [6] (Destinado)
Aterrizaje forzoso al menos a 500 m del lugar previsto. (Actual)
Distancia recorrida: 500 m (1600 pies) (previsto)
Pragyan (del sánscrito : Prajñānam, romanizado : prajñānam, literalmente ‘sabiduría’,[7] [8] (hindi :pragyan (ayuda · información ))[7] [9] indio) es un rover lunar que forma parte de Chandrayaan-3 , una misión lunar desarrollada por la Organización de Investigación Espacial de la India (ISRO).[10] Una versión anterior del rover se lanzó como parte de Chandrayaan-2 el 22 de julio de 2019 y fue destruida junto con su módulo de aterrizaje, Vikram , cuando se estrelló en la Luna el 6 de septiembre.[3] [11] Chandrayaan-3, junto con nuevas versiones del módulo de aterrizaje Vikram y del rover Pragyan lanzados el 14 de julio de 2023,[1] Aterrizó con éxito cerca del polo sur lunar el 23 de agosto.[12]
Descripción general
Vista esquemática del rover
Pragyan tiene una masa de aproximadamente 27 kg (60 lb) y unas dimensiones de 0,9 m × 0,75 m × 0,85 m (3,0 pies × 2,5 pies × 2,8 pies), con una potencia de salida de 50 vatios . [13] Está diseñado para funcionar con energía solar [14] [15] El rover se mueve sobre seis ruedas y está destinado a recorrer 500 metros (1.600 pies) sobre la superficie lunar a una velocidad de 1 cm (0,39 pulgadas) por segundo, realizando análisis en el sitio y enviando los datos a su módulo de aterrizaje para retransmitirlos a la tierra.[16] [17] [18] [19] [20] Para la navegación, el rover estaba equipado con:
- Visión 3D estereoscópica basada en cámaras: dos 1 megapíxel de NAVCAM monocromáticas frente al rover para proporcionar al equipo de control terrestre una vista 3D del terreno circundante y ayudar en la planificación de rutas generando un modelo de elevación digital del terreno.[21] IIT Kanpur contribuyó al desarrollo de subsistemas para la generación de mapas basados en luz y la planificación del movimiento del rover.[22]
- Control y dinámica del motor: el diseño del rover cuenta con un basculante-bogie sistema de suspensión y seis ruedas, cada una impulsada por motores eléctricos CC sin escobillas independientes. La dirección se logra mediante la velocidad diferencial de las ruedas o dirección deslizante.[23]
El tiempo de funcionamiento previsto del rover es de un día lunar o unos 14 días terrestres, ya que su electrónica no fue diseñada para soportar la gélida noche lunar. Su sistema de energía tenía implementado un ciclo de sueño/despertar alimentado por energía solar, lo que podría haber resultado en un tiempo de servicio más prolongado de lo planeado.[24] [25]
Lugar de aterrizaje planificado

Se seleccionaron dos lugares de aterrizaje en la región lunar del polo sur , cada uno con una elipse de aterrizaje de 32 km × 11 km (19,9 mi × 6,8 mi).[6] El lugar de aterrizaje principal (PLS54) está en /70.90267 , aproximadamente a 350 km (220 millas) al norte del borde del Polo Sur-Cuenca Aitken .[26] [6] El lugar de aterrizaje alternativo (ALS01) está en /67,87406 . El sitio principal está en una llanura elevada entre los cráteres Manzinus C y Simpelius N.[27] [26] en la cara cercana de la Luna . [6] Los criterios utilizados para seleccionar las zonas de aterrizaje fueron una ubicación en la región del polo sur y en el lado cercano, una pendiente de menos de 15 grados, con rocas de menos de 50 cm (20 pulgadas) de diámetro, un cráter y una distribución de rocas, estar iluminadas por el sol durante al menos 14 días, y con crestas cercanas que no ensombrezcan el sitio por períodos prolongados.[6]
El módulo integrado de Chandrayaan-3, justo antes de ser cargado en la cápsula
Tanto el sitio planificado como el sitio alternativo se encuentran dentro del cuadrilátero polar LQ30. La superficie probablemente consiste en derretimiento por impacto, posiblemente cubierto por eyecciones de la enorme cuenca del Polo Sur-Aitken y mezclado por impactos cercanos posteriores.[28] La naturaleza del derretimiento es mayoritariamente máfica .[28] es decir, es rico en minerales de silicato , magnesio y hierro . La región también podría ofrecer rocas científicamente valiosas del manto lunar si el impactador de la cuenca excavara toda la corteza.[29]
Aterrizaje forzoso de 2019
Más información: Chandrayaan-2
El módulo de aterrizaje Vikram, que transportaba a Pragyan, se separó del orbitador Chandrayaan-2 el 7 de septiembre de 2019 y estaba previsto que aterrizara en la Luna alrededor de la 1:50 am IST . El descenso inicial se consideró dentro de los parámetros de la misión, superando los procedimientos de frenado críticos según lo previsto. El descenso y el aterrizaje suave debían ser realizados por las computadoras de a bordo de Vikram, pero el control de la misión no pudo hacer correcciones y, por lo tanto, impactó la superficie lunar.[30]
Última actualización de Chandrayaan-3: ISRO dice que la caminata lunar comienza mientras el Rover Pragyan avanza
Misión Chandrayaan-3 según lo previsto, el rover comienza su caminata lunar y realizará experimentos durante 14 días.
India dio un paseo por la luna”, dijo la Organización de Investigación Espacial de la India, dirigida por el estado, y agregó que el rover Chandrayan-3 llevaría a cabo experimentos durante 14 días.
La Organización de Investigación Espacial de la India (ISRO) dijo el jueves (24/08) que Pragyan Rover comenzó su caminata lunar sobre la superficie lunar. En X (anteriormente Twitter), ISRO dijo: “Misión Chandrayaan-3. Rover Chandrayaan-3 a MOX, ISTRAC, ¡comienza la caminata lunar!”
El vehículo lunar ‘Pragyan’ se deslizó por una ram pa desde el módulo de aterrizaje de la nave espacial de la India pocas horas después de su histórico aterrizaje cerca del polo sur de la Luna, dijeron el jueves funcionarios espaciales indios, mientras el país celebraba su nuevo logro científico.
pa desde el módulo de aterrizaje de la nave espacial de la India pocas horas después de su histórico aterrizaje cerca del polo sur de la Luna, dijeron el jueves funcionarios espaciales indios, mientras el país celebraba su nuevo logro científico.
“India dio un paseo por la luna”, dijo la Organización de Investigación Espacial de la India, dirigida por el estado, y agregó que el rover Chandrayan-3 llevará a cabo experimentos durante 14 días, incluido un análisis de la composición mineral de la superficie lunar.
En X (antiguo Twitter), ISRO dijo: “Misión Chandrayaan-3: todas las actividades están según lo previsto. Todos los sistemas son normales. Las cargas útiles del módulo de aterrizaje ILSA, RAMBHA y ChaSTE están encendidas hoy. Las operaciones de movilidad del rover han comenzado. Carga útil SHAPE activada El módulo de propulsión se encendió el domingo.”
Chandrayaan-3 Rover a MOX, ISTRAC, ¡comienza la caminata lunar!
Hoy temprano, ISRO también publicó las imágenes de la cámara Lander Imager que capturó la imagen de la luna justo antes del aterrizaje en la superficie lunar.
“Así es como la cámara Lander Imager capturó la imagen de la luna justo antes del aterrizaje”, publicó ISRO en X.
Después de un viaje de 40 días al espacio, el módulo de aterrizaje Chandrayaan-3, ‘Vikram’, aterrizó en el inexplorado Polo Sur lunar el miércoles por la noche, convirtiendo a la India en el primer país en hacerlo.
India también se convirtió en la cuarta nación después de Estados Unidos, Rusia y China en realizar con éxito una misión de alunizaje.
La nave espacial Chandrayaan-3 colocó el módulo de aterrizaje Vikram en la superficie lunar, inclinándolo a una posición horizontal antes del aterrizaje.
La nave espacial fue lanzada desde el Centro Espacial Satish Dhawan en Sriharikota de Andhra Pradesh el 14 de julio.
El Dr. S. Unnikrishnan Nair, director del Centro Espacial Vikram Sarabhai (VSSC) , confirmó que el evento histórico se desarrolló alrededor de las 12:30 am del jueves.
El rover, ahora en movimiento, está explorando activamente la superficie de la Luna y está dejando su huella indeleble a medida que avanza.
Las distintivas ruedas del rover Pragyan llevan un grabado emblemático con el logotipo de la Organización India de Investigación Espacial (ISRO) y el emblema nacional de la India.
Mientras el rover navega por la extensión lunar, estos grabados están destinados a convertirse en un testimonio de la destreza tecnológica y la ambiciosa misión lunar de la India.
La emoción es palpable cuando los paneles solares del rover y del módulo de aterrizaje se han desplegado de manera efectiva, allanando el camino para la siguiente fase de la misión. Está previsto que el rover se dedique a la recolección de muestras lunares, la ejecución de complejos experimentos y la transmisión de datos invaluables a su base de origen, el módulo de aterrizaje.
Por qué el Pragyan Rover fabricado por ISRO puede funcionar solo durante 14 días
Por el rover pragyan de shashank isro , rover pragyan
Pragyan era el rover de Chandrayaan-2, una misión lunar desarrollada por la Organización de Investigación Espacial de la India (ISRO), lanzada en julio de 2019. Pragyan fue destruido junto con su módulo de aterrizaje, Vikram, cuando se estrelló en la Luna en septiembre de 2019 y Nunca tuve la oportunidad de desplegarme.
El tiempo de funcionamiento previsto del rover Pragyan era de un día lunar o alrededor de 14 terrestres días, ya que su electrónica no está diseñada para soportar la gélida noche lunar. Intentemos saber ¿por qué?
Antes de profundizar en el tema real, debes comprender algunos datos básicos sobre la Luna.
La circunferencia de la Tierra es de 40.075 km y la velocidad de rotación es de 1674 km/h. Por lo tanto, se necesitan 23,939 horas (40075 dividido por 1674) para completar una vuelta completa sobre su eje.
Ahora, si consideramos lo mismo para la Luna, su circunferencia es de 10.921 km y su velocidad de rotación es de 0,004627 km/s, por lo que tarda 2.360.276,637 segundos (10921 dividido por 0,004627), es decir, 656 horas o 27,32 días.
Significa que la Luna tarda 27,3 días en completar un día terrestre.
Teniendo en cuenta los hechos anteriores, debemos entender que un día en la Tierra equivale a 27 días en la Luna. Según los informes de ISRO, el rover recibe su energía operativa de energía solar que sólo se puede obtener durante el día. Durante la noche hace mucho frío y alcanza hasta 180 grados. Nuestros científicos han calculado la vida útil del rover según el horario diurno, que es de 14 días en la Luna.
Chandrayaan-3 (2023)
Chandrayaan-3 fue lanzado a bordo de un cohete LVM3 -M4 el 14 de julio de 2023, a las 09:05 UTC desde el Centro Espacial Satish Dhawan Second Launch Pad en Sriharikota, Andhra Pradesh, India. El 23 de agosto de 2023, cuando el módulo de lander se acercaba al punto bajo de su órbita, sus cuatro motores se dispararon como una maniobra de frenado a 30 kilómetros (19 mi) sobre la superficie de la Luna.  Después de 11,5 minutos, el módulo de lander estaba a 7,2 km (4,5 millas) por encima de la superficie; mantuvo esta altitud durante unos 10 segundos, luego se estabilizó utilizando ocho propulsores más pequeños y rotó de una posición horizontal a una posición vertical mientras continuaba su descenso.
Después de 11,5 minutos, el módulo de lander estaba a 7,2 km (4,5 millas) por encima de la superficie; mantuvo esta altitud durante unos 10 segundos, luego se estabilizó utilizando ocho propulsores más pequeños y rotó de una posición horizontal a una posición vertical mientras continuaba su descenso.
Una de las imágenes capturadas por la sonda Chandrayaan-3.Imagen: ISRO
Luego utilizó dos de sus cuatro motores para ralentizar su descenso a aproximadamente 150 metros (490 pies); se cernía allí durante unos 30 segundos y se situó en un punto de aterrizaje óptimo antes de continuar hacia abajo y tocar abajo a las 12:32 UTC.[37][38]
Después de l legar al polo sur de la Luna, Chandrayaan-3 desplegó el rover para explorar la superficie de caja, aprovechó cámaras integradas para enviar videos de su entorno, y comenzó a trabajar en los objetivos de investigación previstos para una exploración de dos semanas de la Luna.[39]
legar al polo sur de la Luna, Chandrayaan-3 desplegó el rover para explorar la superficie de caja, aprovechó cámaras integradas para enviar videos de su entorno, y comenzó a trabajar en los objetivos de investigación previstos para una exploración de dos semanas de la Luna.[39]
Pragyan se despliega en la Luna
El primer video del rover, publicado el 25 de agosto de 2023, lo mostró saliendo del módulo de aterrizaje Vikram en una rampa y conduciendo a la Luna. ISRO publicó el video en un hilo en Twitter que también incluía imágenes del módulo de aterrizaje acercándose a su sitio de aterrizaje y pateando polvo mientras tocaba tierra en la superfi cie. ISRO escribió después que los dos instrumentos científicos del rover habían sido encendidos y que se había movido ocho metros.[40]
cie. ISRO escribió después que los dos instrumentos científicos del rover habían sido encendidos y que se había movido ocho metros.[40]
El rover Pragyan captura a la sonda Vikram en una instantánea. / ISRO
El 26 de agosto, la ISRO publicó un nuevo video, filmado desde el módulo de langa, de la unidad del rover, alejándose casi fuera de la vista del módulo de lander.[41] El 27 de agosto, publicó dos imágenes después de que el rover se encontrara con un gran cráter posicionado tres metros por delante de su ubicación. Sin embargo, el rover se dirigió de forma segura por un nuevo camino después.[42][43]
Más tarde, el 30 de agosto, a las 7:35 am, el rover tomó una foto del módulo degillo Vikram, mostrando sus dos cargas útiles, Chaste e ILSA, había desplegado.[44] Otra imagen fue captada a las 11:04 del mismo día, desde una distancia de 15 m.[45]
El 2 de septiembre, el rover terminó todas las tareas y entró en modo de sueño en preparación para despertar el 22 de septiembre, sin embargo, no se esperaba que continuara trabajando.[46] Su batería estaba completamente cargada cuando entró en hibernación.[47] Sin embargo, después de más de dos semanas, tanto el rover como las reactivaciones de su módulo de lander se retrasaron al 23 por razones no especificadas.[48] Al 28 de septiembre de 2023, el rover todavía no había despertado[49] y desde la ISRO no ha proporcionado actualizaciones. Se presume que el rover Pragyan está muerto.
Rover Pragyan de la India encontró azufre en la región subpolar sur de la Luna
Publicado el 31 agosto, 2023 por Victor Roman
La misión Chandrayaan-3 de India, que aterrizó en la Luna hace apenas una semana, ya ha realizado observaciones científicas significativas en el polo sur lunar. El rover a bordo ha confirmado la presencia de azufre en la región, según anunció la Organización de Investigación Espacial de la India (ISRO).
El rover Pragyan, parte de esta misión, llevó consigo el instrumento LIBS (Espectroscopía de Descomposición Inducida por Láser), que utilizó para analizar el regolito lunar. Este logro es especialmente destacable, pues marca la primera vez que un rover explora esta área en particular.
Mediante el instrumento LIBS, se realizaron las primeras mediciones in situ sobre la composición elemental de la superficie lunar cerca del polo sur. Con ello se ha podido confirmar de manera inequívoca la presencia de azufre, un hito que no se había logrado con los instrumentos de los orbitadores anteriores.
Análisis preliminares sugieren la presencia de elementos adicionales como aluminio, hierro, calcio, cromo y titanio. ISRO también comunicó el hallazgo de trazas de manganeso, silicio y oxígeno. Actualmente, se está investigando a fondo la posible presencia de hidrógeno.
Importancia
Sabemos que las poderosas agencias espaciales de China, Rusia y Estados Unidos ya han realizado alunizajes exitosos. Sin embargo, los intentos previos de llegar al polo sur lunar no habían tenido éxito. Rusia recientemente, y la propia India hace algunos años, sufrieron accidentes durante el aterrizaje en la superficie lunar.
Estados Unidos ya han realizado alunizajes exitosos. Sin embargo, los intentos previos de llegar al polo sur lunar no habían tenido éxito. Rusia recientemente, y la propia India hace algunos años, sufrieron accidentes durante el aterrizaje en la superficie lunar.
Se cree que el polo sur lunar es la zona más rica en agua de la Luna. Por ese motivo, el rover Pragyan se dedicará las próximas dos semanas a buscar signos de agua congelada con su láser. Además, estudiará la atmósfera y determinará la composición exacta del polo sur.
El hallazgo de agua congelada en la superficie lunar tendría un valor incalculable. Se podría utilizar para producir oxígeno respirable en bases lunares y proporcionaría los componentes esenciales para el combustible de cohetes que faciliten misiones a Marte.
El instrumento LIBS a bordo del rover confirma sin ambigüedades la presencia de azufre (S) en la superficie lunar cerca del polo sur, mediante las primeras mediciones in situ. / ISRO
“Sabiduría e inteligencia”
El rover Pragyan, cuyo nombre proviene de la palabra hindú que significa la forma más alta y pura de sabiduría e inteligencia, pesa solo 25.8 kg y tiene el tamaño aproximado de un pastor alemán pequeño. Está equipado no solo con la herramienta LIBS basada en láser, sino también con un haz de partículas alfa.
La técnica LIBS detecta elementos al disparar láseres intensos en la superficie lunar, generando plasma caliente. Luego de estudiar la luz de este plasma, los investigadores pueden identificar las longitudes de onda de diversas partículas en esa sección específica de la Luna.
El rover Pragyan ha hecho lo que se esperaba que hiciera: jefe de ISRO
Sobre el estado de Pragyan, actualmente en modo de suspensión en la luna, el jefe de ISRO dijo que se despertará si sus circuitos electrónicos no han sido dañados debido al clima extremo en la luna, ya que la temperatura cayó casi 200 grados centígrados bajo cero.
28 de septiembre de 2023
Crédito de la foto: ANI
El presidente de la Organización de Investigación Espacial de la India (ISRO), S. Somanath, afirmó el jueves que el rover Pragyan de su misión lunar Chandrayaan-3 ha hecho lo que se esperaba que hiciera y que no sería un problema incluso si no logra “despertar”. ‘desde el modo de suspensión actual .
La agencia espacial nacional se está preparando para el lanzamiento del XPoSat o satélite polarímetro de rayos X, que podría tener lugar en noviembre o diciembre, dijo en una conferencia de prensa aquí después de visitar el famoso templo de Somnath en el distrito Gir Somnath de Gujarat.
Sobre el estado de Pragyan, actualmente en modo de suspensión en la luna , el jefe de ISRO dijo que se despertará si sus circuitos electrónicos no han sido dañados debido al clima extremo en la luna, ya que la temperatura descendió casi 200 grados centígrados bajo cero.
“Está bien si no se despierta porque el rover ha hecho lo que se esperaba que hiciera”, añadió.
ISRO había dicho la semana pasada que al amanecer en la luna, hizo esfuerzos para establecer comunicación con el módulo de aterrizaje Vikram de la misión lunar Chandrayaan-3 y el rover Pragyan para determinar su “condición de despertar” después de haber sido puestos en modo de suspensión a principios de este mes. pero no se recibían señales.
Tanto el módulo de aterrizaje como el rover se pusieron en modo de suspensión los días 4 y 2 de septiembre, antes de la llegada de la noche lunar.

Esta imagen de ISRO traza la trayectoria del rover mientras se movía 100 metros desde el módulo de aterrizaje, en la Luna..
“Misión Chandrayaan-3: el rover completó sus tareas. Ahora está estacionado de manera segura y en modo de suspensión. Las cargas útiles APXS y LIBS están desactivadas. Los datos de estas cargas útiles se transmiten a la Tierra a través del módulo de aterrizaje”, publicó la agencia espacial en X.
La batería está completamente cargada y el panel solar está orientado para recibir la luz en el próximo amanecer previsto para el 22 de septiembre, añadió.
“Actualmente, la batería está completamente cargada. El panel solar está orientado para recibir la luz en el próximo amanecer previsto para el 22 de septiembre de 2023. El receptor se mantiene encendido. ¡Esperando un despertar exitoso para otra serie de tareas! De lo contrario, permanecerá allí para siempre como embajador lunar de la India”, publicó la ISRO.
La NASA encuentra el lugar donde el rover indio Pragyan hiberna
Gracias a una sonda que orbita la Luna, ahora se sabe cómo luce el sitio de alunizaje de la misión Chandrayaan-3.

El punto más iluminado de la composición es el sitio de alunizaje del módulo Vikram, de India./NASA
El vehículo Lunar Reconnaissance Orbiter (LRO) de la NASA detectó el punto ‘Shiv Shakti’, el sitio donde alunizó el módulo Vikram y el rover Pragyan el pasado 23 de agosto. La foto tomada desde un plano cenital permite dimensionar los primeros pasos del vehículo de la India, así como todos los obstáculos por los que atravesará en sus futuras misiones.
La NASA aprovechó el camino del LRO para fotografiar el área del reciente alunizaje. El punto cero de la misión india se percibe como una pequeña circunferencia luminosa que contrasta con la paleta de grises en la composición. De acuerdo con la agencia espacial, la tonalidad surge a partir de la interacción de la columna del cohete del Vikram con el regolito lunar de grano fino.
El punto ‘Shiv Shakti’ se posiciona a 600 kilómetros del polo sur de la Luna. Es lo más cerca que ha estado un vehículo humano de la región. La misión Chandrayaan-3 tenía como objetivo llevar instrumentos de investigación a esa zona hasta ahora inexplorada. Desde su despliegue, el rover Pragyan caminó una centena de metros y usó su instrumento láser para verificar la composición del suelo lunar. Encontró que el sur del satélite contiene azufre, además de los elementos usuales como aluminio, calcio, hierro, cromo, titanio, manganeso, silicio y oxígeno.
En la foto también se alcanza a distinguir el cráter con el que se encontró el Pragyan. La estructura lunar de cuatro metros de diámetro obligó al vehículo a virar para no poner en riesgo su misión. El explorador busca depósitos de hidrógeno en el extremo del satélite con la esperanza de identificar agua congelada.
Axiom Mission 1
Axiom Mission 1
La primera misión espacial totalmente privada de la historia a la ISS.
SpaceX Axiom Space-1
Insignia de la misión SpaceX Axiom Space-1
Tipo de misión: Turismo espacial a la ISS
Operador
Duración de la misión: Diez días (planeada)
Propiedades de la nave
Tipo de nave: Crew Dragon
Fabricante: SpaceX
Tripulación
Tamaño: 4
Miembros: Miguel López-Alegría; Larry Connor; Mark Pahty; Eitan Stibbe
Comienzo de la misión
Lanzamiento: 8 de abril de 2022
Vehículo: Falcon 9 Block 5
Contratista: SpaceX
Fin de la misión
Aterrizaje: 25 de abril de 2022
Lugar: Océano Atlántico
Parámetros orbitales
Sistema de referencia: Órbita geocéntrica
Régimen: Órbita terrestre baja
Inclinación: 51.66°
Acople con ISS
Puerto de acople: Harmony PMA/IDA frontal o cénit
Tiempo acoplado: Ocho días (planeado)

La Crew Dragon aproximándose al puerto frontal del Harmony durante la Demo-2nota 1
Axiom Mission 1 (AX-11 o Ax12) es la cuarta misión tripulada realizada de la Crew Dragon de SpaceX a la Estación Espacial Internacional (ISS), operada por SpaceX en nombre de Axiom Space. El vuelo fue lanzado el 8 de abril de 20223 y transportó cuatro personas a la ISS por una estancia de aproximadamente ocho días:45 El español, nacionalizado estadounidense y comandante de la misión, Miguel López-Alegría6 como ex-astronauta entrenado profesionalmente por la NASA y empleado actualmente por Axiom Space, como piloto; Larry Connor de Estados Unidos, y los especialistas de misión, Mark Pathy de Canadá y Eytan Stibbe el segundo ciudadano israelí en llegar al espacio.789
Antecedentes
Axiom Space fue fundada en 2016 con el objetivo de crear la primera estación espacial comercial del mundo. A principios de 2020, la NASA anunció que Axiom había recibido acceso al puerto frontal del módulo Harmony de la ISS, al que Axiom planea acoplar su Segmento Orbital; un complejo de mínimo tres módulos presurizados y una gran ventana de observación – similar a la Cupola – que facilitaría las operaciones de la compañía en la órbita terrestre baja.10 Antes del lanzamiento del primer módulo en 2024, Axiom planea organizar y volar misiones tripuladas a la ISS, consistiendo de turistas espaciales o astronautas de agencias públicas u organizaciones privadas.11 En marzo de 2020, Axiom anunció que fletaría un vuelo a la ISS en la Crew Dragon de SpaceX a finales de 2021.12 Esta misión será la primera misión operada completamente de forma comercial a la ISS, y una de las primeras dedicadas enteramente al turismo espacial, junto con la Soyuz MS-20 de Roscosmos, realizada en diciembre de 2021.13 Tras este vuelo, Axiom planea ofrecer misiones tripuladas a la ISS hasta dos veces al año, “[alineandose] con las oportunidades según sean liberadas por la NASA”.14
Tripulación
Originalmente estaba previsto que Miguel E. López-Alegría,6 Tom Cruise y Doug Liman estuvieran en el vuelo, quienes realizarían un proyecto cinematográfico.15 El 16 de noviembre de 2020, el gobierno israelí anunció que Eytan Stibbe formaría parte de la tripulación como el segundo israelí de la historia en ir al espacio.16712 Cada asiento disponible para turistas espaciales se anunció con un coste de 55 millones de dólares.17 Tras el lanzamiento de la Demo-2, el primer vuelo de prueba de la Dragon 2, el CEO de Axiom Michael Suffredini declaró que planeaban anunciar los nombres de la tripulación “en un mes” pero se retrasaron más de lo esperado en hacer el anuncio.
Finalmente, el 26 de enero de 2021 Axiom anunció, que la tripulación final de la misión estaría conformada por el ex-astronauta de la NASA, y español nacionalizado estadounidense, Miguel E. López-Alegría como comandante, Stibbe, el emprendedor estadounidense Larry Connor como piloto y el inversor canadiense Mark Pathy.9818 También se anunció que la ex-astronauta de la NASA, Peggy Whitson y John Shoffner formarían parte de la tripulación de reserva.19
| Tripulación principal | |
| Puesto | Viajero espacial |
| Comandante de la nave | / Miguel López-Alegría, Axiom Space Quinto vuelo |
| Piloto | Larry Connor Primer vuelo |
| Especialista de Misión 1 | Mark Pathy Primer vuelo |
| Especialista de Misión 2 | Eytan Stibbe Primer vuelo |
Misión
La misión fue lanzada el 8 de abril de 2022 por medio de un cohete Falcon 9 Block 5 desde el Complejo de Lanzamiento 39A del Centro Espacial John F. Kennedy, una plataforma de lanzamiento de la NASA alquilada a SpaceX para lanzamientos del Falcon 9 y el Falcon Heavy.2019 Según el comandante de la misión y actual empleado de Axiom Space, Michael López-Alegría, viajaran en su quinta misión, en la cápsula Crew Dragon Resilience utilizada con anterioridad en la misión SpaceX Crew-1,21 y en la misión Inspiration4, reali zando así esta cápsula su tercer vuelo y siendo la primera cápsula Dragon 2, en ser reutilizada por segunda vez. La planificación del vuelo fue de dos días en llegar a la estación y acoplarse con el módulo Harmony, momento en el que comenzó su estadía de ocho días en la Estación Espacial Internacional (ISS).22 Transcurridos esos días en la ISS, la nave se desacoplará y realizará el viaje de regreso a la Tierra, finalizando mediante un amerizaje en el Océano Atlántico.
zando así esta cápsula su tercer vuelo y siendo la primera cápsula Dragon 2, en ser reutilizada por segunda vez. La planificación del vuelo fue de dos días en llegar a la estación y acoplarse con el módulo Harmony, momento en el que comenzó su estadía de ocho días en la Estación Espacial Internacional (ISS).22 Transcurridos esos días en la ISS, la nave se desacoplará y realizará el viaje de regreso a la Tierra, finalizando mediante un amerizaje en el Océano Atlántico.
El lanzamiento de la misión Axiom 1 ha sido un éxito. Por qué es importante el primer viaje privado a la ISS y qué podemos esperar ahora
9 Abril 2022
Pathy, Connor, López Alegría y Stibbe dentro de la Endeavour (Axiom Space).
“¡Qué lanzamiento histórico!” El grito de alegría es de Bill Nelson, administrador de la NASA, y, efectivamente, lo que se lo ha arrancado es un hito, un acontecimiento pionero que se ha registrado hace solo unas horas en el Centro Espacial Kennedy, en Florida. A las 11.17 am EDT despegaba de su plataforma de lanzamiento un cohete Falcon 9 de SpaceX que acoge la primera misión privada que se dirige a la Estación Espacial Internacional (ISS). En su casi cuarto de siglo de historia es la primera vez que la plataforma recibirá los integrantes de un vuelo totalmente comercial.
Los detalles de la misión. La misión Axiom 1 se prolongará en total diez días. Durante la mayor parte de ese tiempo —ocho jornadas— sus cuatro miembros estarán a bordo de la ISS centrados en demostraciones y experimentos.
La empresa detrás de la misión es Axiom Space, que presume de haber capitaneado “la primera misión de astronautas totalmente privada del mundo a la ISS”. La compañía tiene su sede en Texas, en EEUU, y se dedica a organizar misiones espaciales para “astronautas privados” como Axiom 1. Su labor sin embargo no se limita a orquestar operaciones. Los planes de Axiom Space pasan por que haya un módulo comercial que se pueda agregar al nodo Harmony de la ISS en 2024.
No los llames turistas espaciales. A diferencia de otras compañías clave en la industria de los vuelos espaciales privados, una industria emergente, al alza y que promete mover sumas cuantiosas, como Blue Origin, Virgin Galactic o la propia SpaceX, Axiom Space parece centrada en el potencial de las misiones comerciales. En la ISS y, en el futuro, en una estación privada. Por lo pronto, la compañía parece querer mantener distancias con el concepto de “turismo espacial”.
El propio López-Alegría rechaza ese término e incide en la preparación e incluso el trabajo que desarrollarán los tripulantes de Axiom-1 en la ISS. Sus misiones espaciales para lo que denomina “astronautas privados” requieren 17 semanas de entrenamiento e itinerarios personalizados. Dentro de la estación los integrantes de la misión realizarán, asegura la empresa, más de 25 experimentos. Más allá de las denominaciones, lo cierto es que Axiom Space busca captar el interés de grupos académicos: “Abre más oportunidades para científicos e investigadores de todo el mundo”.
El cohete SpaceX Falcon 9 que transporta la nave espacial Dragon con la misión Ax-1.
A bordo de la ISS, López-Alegría, Connor, Pathy y Stibbe se encontrarán con tres astronautas de la NASA, uno de la Agencia Espacial Europea y tres del organismo ruso. En una entrevista con El País, el propio López-Alegría reconocía en marzo que “será muy incómodo ver el humo en Ucrania”.
Lo que está por venir. Axiom-1 puede ser la primera misión totalmente comercial a la ISS, pero la compañía de Texas no plantea que sea la única. A finales de 2021 la NASA y Axiom anunciaron que entre el otoño de 2022 y la primavera de 2023 se lanzará una segunda operación privada a la ISS, la Ax-2, que durará un máximo de 14 jornadas. La compañía prevé además agregar un nodo comercial habitable a la ISS en 2024 y plantea incluso que en 2030 haya una estación privada, lista para tomar el relevo de la actual, que data ya de finales de los 90 y ha sido impulsada por agencias.
la única. A finales de 2021 la NASA y Axiom anunciaron que entre el otoño de 2022 y la primavera de 2023 se lanzará una segunda operación privada a la ISS, la Ax-2, que durará un máximo de 14 jornadas. La compañía prevé además agregar un nodo comercial habitable a la ISS en 2024 y plantea incluso que en 2030 haya una estación privada, lista para tomar el relevo de la actual, que data ya de finales de los 90 y ha sido impulsada por agencias.
“Tenemos el primer módulo en 2024. Seis meses después, un segundo módulo. Y otros seis meses después, un tercero. Entonces haremos una pausa a la espera de que la NASA y los otros socios de la ISS decidan hundirla. En ese momento mandaremos el cuarto módulo, que es el que proporciona la mayoría de la electricidad”, explicaba el directivo de la compañía a El País en marzo.
 Imágenes | Axiom Space y NASA
Imágenes | Axiom Space y NASA
La tripulación antes del lanzamiento: Connor, Pathy, López Alegría y Stibbe (Axiom Space).
El comandante de la misión es Michael López Alegría (63 años). Este es su quinto vuelo espacial después de haber participado en las misiones del transbordador STS-73, STS-92 y STS-113, así como en la misión Soyuz TMA-9. Tras retirarse de la NASA en 2012, López Alegría es actualmente astronauta de la empresa Axiom Space. Tiene la doble nacionalidad estadounidense y española, razón por la que la bandera de España aparece en el emblema de la misión Eso sí, en las misiones de la NASA figura oficialmente como astronauta estadounidense al representar al gobierno de EE UU, de ahí que formalmente sea Pedro Duque el primer astronauta español. López Alegría acumula 257 días en el espacio y ha llevado a cabo nada más y nada menos que diez paseos espaciales —con escafandras rusas y estadounidenses—, un número que lo convierte en el astronauta de EE UU con más experiencia en actividades extravehiculares, solo por detrás del ruso Anatoli Solovyov.
Etapas Proyecto AXIOM estación espacial privada.


La cápsula Endeavour durante el traslado a la rampa (NASA

La Crew Dragon Endeavour en la rampa 39A (Axiom Space).


El cohete en la rampa (SpaceX)

El lanzador listo para el despegue (Axiom Space). Despegue (NASA).

Emblema de la misión (Axiom Space).
Regreso de la misión espacial privada Axiom-1
Posted on:Wednesday 27 April 2022 — 00:57
La cápsula Crew Dragon Endeavour (C-206) finalizó con éxito su tercera misión tripulada el pasado 25 de abril de 2022 cuando amerizó a las 17:06 UTC en el océano Atlántico, frente a las costas de Jacksonville (Florida). A bordo viajaba el astronauta de la empresa Axiom Space Michael López-Alegría (comandante) y los «astronautas de pago» Larry Connor (piloto), Mark Pathy y Eytan Stibbe (Israel). Finalizaba así la misión Axiom-1 (Ax-1) la primera «doblemente privada» —al tratarse de una misión espacial encargada por una empresa privada a otra empresa privada— y la primera misión espacial comercial que se desarrolla en la Estación Espacial Internacional (ISS) sin intervención directa de ningún organismo gubernamental. Aunque inicialmente estaba previsto que los cuatro hombres pasasen diez días en el espacio, el mal tiempo en la zona de Florida obligó a posponer el amerizaje repetidamente, de tal modo que la duración final de la misión ha sido de 17 días y 1 hora.
 La Endeavour antes de acoplarse (NASA). La Endeavour y la Luna (NASA).
La Endeavour antes de acoplarse (NASA). La Endeavour y la Luna (NASA).
Después de ser lanzada el 8 de abril a las 15:17 UTC, la Endeavour se acopló con el puerto IDA-3PMA-3, en la posición zenit del módulo Harmony del segmento estadounidense de la ISS, a las 12:29 UTC del 9 de abril. La nave tuvo que esperar casi una hora a veinte metros de distancia por culpa de un problema de software que afectó a las imágenes de una de las cámaras usadas en el acoplamiento. Durante quince días, la tripulación de la Axiom-1 convivió con los siete astronautas de la Expedición 67 de la ISS, formada por Thomas Marshburn (NASA), Raja Chari (NASA), Kayla barron (NASA), Matthias Maurer (ESA), Oleg Artemyev (Roscosmos), Denís Matveiev (Roscosmos) y Serguéi Kórsakov (Roscosmos). Además de disfrutar de la estación y de su viaje, los tres astronautas de pago llevaron a cabo varias videoconferencias para divulgar su experiencia espacial y realizaron un total de 25 experimentos científicos y actividades de todo tipo. Algunos de estos experimentos se desarrollaron en colaboración con hospitales de Minnesota, Cleveland y Montreal.

La Crew Dragon Endeavour acoplada al módulo PMA-3 (NASA).
Configuración de la ISS durante la visita de la Ax-1 (NASA).


Stibbe jugando con el agua (Axiom).

Otra vista de la Ax-1 Endeavour acoplada (NASA).

Apertura de los paracaídas principales en infrarrojo (SpaceX). Amerizaje (SpaceX).


El panel de control de la Endeavour ya en el barco (SpaceX).
El comandante tras la misión (SpaceX).
CHEOPS
CHEOPS (satélite)
Satélite de Caracterización de Exoplanetas (CHEOPS)
Estado: En curso
Tipo de misión: Exoplanetología, astrofísica
Operador: Oficina Espacial Suiza ESA
Nº. SATCAT: 44874
ID NSSDCA: 2019-092B
Página web [cheops.unibe.ch: sci.esa.int/cheops]
Proyecto: https://cheops.unibe.ch/
Descripción: https://ui.adsabs.harvard.edu/abs/2020arXiv200911633B/abstract
Duración planificada: 3,5 años
Duración de la misión: 3 años, 1 mes y 21 días
Propiedades de la nave
Fabricante: Airbus Defence and Space (España)
Masa de lanzamiento: 273 kg 7; Carga útil: 58 kg 8
Dimensiones: 1,5 x 1,5 x 1,5 m
Potencia eléctrica: 64 vatios 9
Comienzo de la misión
Lanzamiento: 18 de diciembre de 2019 08:54:20 UTC 2
Vehículo: Soyuz VS23 34. Arianespace56
Lugar: Guiana Space Centre; (Ensemble de Lancement Soyouz)
Contratista: Arianespace
Parámetros orbitales
Sistema de referencia: Órbita geocéntrica
Régimen: Heliosíncrona 06:00 / 18:00
Altitud del periastro: 712 km 10
Altitud del apastro: 715 km
Inclinación: 92,8°
RAAN: 06:00
Tipo: Ritchey-Chrétien; CCD con iluminación posterior frame-transfer
Diámetro: 32 cm 6
Longitud focal: F/8
Longitudes de onda: 330-1100 nm
Transpondedores
Capacidad: downlink 1,2 Gbit/día 12; Cosmic Vision
El observatorio espacial CHaracterising ExOPlanets Satellite (CHEOPS, por sus siglas en inglés/Satélite para la Caracterización de Exoplanetas en español) de la Agencia Espacial Europea (ESA), es la primera misión exoplanetaria europea.
Su objetivo es determinar el tamaño de los exoplanetas conocidos, lo que permitiría estimar su masa, densidad, composición y formación.
Este es el primer observatorio centrado en el análisis de tránsitos exoplanetarios utilizando fotometría de alta precisión, aplicadas a las estrellas más brillantes del cielo nocturno con planetas confirmados orbitando en torno a ellas, además, de la medición con un nivel de detalle sin precedentes de la densidad media de supertierras y minineptunos.
Sus observaciones permitirán establecer una relación entre la masa y radio de un planeta, y conocer cuál es el límite que separa a los cuerpos telúricos de los gigantes gaseosos.
El telescopio forma parte con la primera misión de clase pequeña del programa científico Cosmic Vision de la ESA.13
El proyecto fue seleccionado entre veintiséis candidatos el viernes 19 de octubre de 2012 y contará con un presupuesto de 50 millones de euros.14 Su lanzamiento estaba previsto para finales de 2017, pero por diversas circunstancias fue aplazado para ser enviado al espacio a finales de 2019 a bordo de un cohete Soyuz. Después de varios retrasos anunciados por Arianespace (comercializadora del lanzamiento), el lanzamiento fue previsto para el 17 de diciembre15516 a las 9:54 horas (CET) desde el Puerto espacial europeo de Kourou, Guayana Francesa.
Tras ser pospuesto una vez más por problemas detectados en el cohete Soyuz durante una de las comprobaciones del software, a una hora y veinticinco minutos de su lanzamiento, y estando previsto su lanzamiento para veinticuatro horas después,171819 el satélite despegó con éxito a las 08:54 horas (UTC) del día 18 de diciembre de 2019.202122
Descripción
Como el Telescopio Espacial Kepler, CHEOPS observará tránsitos exoplanetarios, recopilando información cuando un cuerpo planetario pase frente a su estrella desde su perspectiva. Sin embargo, mientras que el Kepler contempla 150 000 estrellas en busca de nuevos planetas, el CHEOPS se centrará en cada una de forma individual y en exoplanetas ya conocidos.14 Podrá apuntar a prácticamente cualquier parte del cielo y utilizará fotometría de muy alta precisión para determinar el radio exacto de cuerpos planetarios de masa conocida, de entre 1 y 20 M⊕.23 De este modo, podrá identificar su estructura interna, aportar información relevante sobre su formación y perfilar los objetivos principales de la próxima generación de telescopios terrestres y orbitales.24
CHEOPS será la primera de una serie de pequeñas misiones del Programa de Ciencia de la Agencia Espacial Europea, compuesta por satélites muy especializados y de rápido desarrollo que completarán las labores realizadas por proyectos de mayor tamaño.16 El 19 de octubre de 2012 fue seleccionada entre un total de veintiséis propuestas y fue incorporada al Programa de Ciencia dieciocho meses después, en febrero de 2014. La misión está siendo desarrollada en colaboración con la Universidad de Berna, la Oficina Espacial Suiza (SSO) y una división de la Secretaría de Estado Suiza de Educación, Investigación e Innovación (SERI). En total, once estados miembros de la ESA participan en el proyecto y cuentan con representación en el Programa de Ciencia de CHEOPS. El satélite será construido en España por Airbus Defence & Space.16
Características
Diagrama de un telescopio Ritchey-Chrétien.
El satélite tiene una estructura de base hexagonal y unas dimensiones aproximadas de 1,5 metros de largo, ancho y alto, basándose en la plataforma SeoSat.12 Cuenta con un telescopio Ritchey-Chrétien de tamaño medio,23 de 30 cm de apertura y 1,2 m de longitud, desarrollado por la Universidad de Berna.2526 montado en un banco óptico rígido.27 El sensor CCD del CHEOPS operará en una longitud de onda visible, entre 400 y 1100 nm,28 con una sensibilidad capaz de detectar un exoplaneta de un tamaño similar a la Tierra alrededor de una estrella de 0,9 M☉ en una órbita de sesenta días.23
Los paneles solares, ubicados sobre un escudo solar que protegerá la carcasa del radiador y el detector contra los rayos del Sol, proporcionarán un suministro continuo de 64 W con el que mantener sus operaciones y permitir la descarga de 1,2 Gb de datos diarios.23 Además, dispondrá de una batería para almacenar el excedente de energía y mantener el telescopio en funcionamiento incluso durante las fases de eclipse.29
CHEOPS efectuará sus observaciones a poca distancia de la superficie, entre 650 y 800 km de altitud, y permanecerá en una órbita heliosincrónica de 98º de inclinación.2325 La vida útil del proyecto es de tres años y medio,25 y contará con un presupuesto de 50 millones de euros.16
Sistema de control de actitud y órbita (AOCS)
El sistema de control está estabilizado en 3 ejes, pero bloqueado en el nadir, asegurando que uno de los ejes de la nave espacial siempre apunte hacia la Tierra. Durante cada órbita, la nave girará lentamente alrededor de la línea de visión del telescopio para mantener el radiador del plano focal orientado hacia el espacio frío, permitiendo el enfriamiento pasivo del detector. La duración típica de observación será de 48 horas. Durante una observación típica de 48 horas, CHEOPS tendrá una estabilidad de puntería mejor que ocho segundos de arco con una confianza del 95%.1230
Sistema de instrumentos CHEOPS (CIS)
El detector, la electrónica de soporte, el telescopio, la óptica de fondo, la computadora del instrumento y el hardware de regulación térmica se conocen agrupadamente como el Sistema de Instrumento CHEOPS (CHEOPS Instrument System (CIS)). La precisión fotométrica requerida se logrará utilizando un detector CCD retroiluminado de transferencia de fotogramas simple de Teledyne e2v con 1024 × 1024 píxeles y un paso de píxeles de 13 µm. El CCD está montado en el plano focal del telescopio y se enfría pasivamente a 233 K (−40 °C; −40 °F), con una estabilidad térmica de 10 mK.
Placas
Se han fijado dos placas de titanio con miles de dibujos miniaturizados de niños en CHEOPS. Cada placa mide casi 18cm × 24cm (7,1 pulgadas × 9,4 pulgadas). Las placas, preparadas por un equipo de la Universidad de Ciencias Aplicadas de Berna, fueron presentadas en una ceremonia dedicada en RUAG el 27 de agosto de 2018.31
Objetivos
El principal objetivo de la misión CHEOPS es estudiar la estructura de exoplanetas menores que Saturno, con entre 1 y 20 M⊕, pertenecientes a las estrellas más brillantes del cielo nocturno que cuentan con planetas confirmados a su alrededor. Una vez identificadas con exactitud la masa y el radio de una muestra significativa, será posible establecer restricciones estructurales para los exoplanetas, así como nuevas teorías sobre la formación y evolución de los cuerpos planetarios en ese rango de masas.32 El satélite centrará sus observaciones en exoplanetas confirmados por el método de velocidad radial, que los detecta por las oscilaciones que causan en sus estrellas como consecuencia de sus órbitas. Por tanto, el método infiere la masa de un planeta pero no sus dimensiones, que es el objetivo de la misión CHEOPS. Determinando su radio con precisión, se podrá estimar su composición y conocer si es terrestre o gaseoso mediante el cálculo de su densidad.32 Así, se establecerá con exactitud la relación entre masa y radio de los cuerpos planetarios con masas entre 1 y 20 M⊕.33
En el disco de acrecimiento de un planeta en fase de formación, el núcleo de este último debe alcanzar una masa crítica antes de disponer de una gravedad suficiente como para alcanzar una acreción descontrolada de gas que lo convierta en un gigante gaseoso. El potencial de un planeta para retener una gruesa atmósfera de hidrógeno u otros compuestos volátiles varía en función de numerosos factores, como su composición, la metalicidad de su estrella, la distancia respecto a esta o semieje mayor y, por supuesto, la propia masa del planeta.33
Las investigaciones del equipo de Courtney Dressing —Centro de Astrofísica Harvard-Smithsonian (CfA)— partiendo de los datos del HARPS-N, indican que existe un límite natural de unos 1,6 R⊕, por debajo del cual la mayoría de los planetas son cuerpos telúricos.3435 Además, sugieren que los planetas con masas inferiores a 6 M⊕ tienen altas probabilidades de presentar una composición similar a la de la Tierra.36 Las observaciones del CHEOPS, mucho más precisas, permitirán identificar con más detalle la relación masa-radio de los cuerpos planetarios y el grado en que otros factores, como la distancia entre el planeta y su estrella, pueden afectar a la densidad del objeto.33
Sus observaciones serán de gran utilidad para futuros telescopios como el JWST y el ATLAST, que podrán efectuar análisis espectroscópicos de las atmósferas de los planetas en busca de indicios de vida extraterrestre.3738


Figura 1: Izq: Modelo informático de CHEOPS totalmente integrado (©ESA/ATF medialab). Derecha: CHEOPS en la sala limpia de Airbus Defence and Space en Madrid, en febrero de 2019 (© ESA – S. Corvaja).

Figura 2: Diagrama masa-radio de los planetas conocidos de menos de 10 masas terrestres y con una masa y un radio determinados con una precisión mejor que el 20%. Las barras de error indican la incertidumbre en las medidas. Las líneas de colores señalan las relaciones entre la masa y el radio para distintas composiciones posibles, desde una bola de hierro puro a un planeta totalmente compuesto por agua.
El satélite Cheops observa sus primeros exoplanetas
Avion Revue | 16 abril 2020
Cheops, la nueva misión exoplanetaria de la ESA, ha completado con éxito los casi tres meses de puesta en servicio en órbita, superando las expectativas en cuanto a rendimiento. El satélite, que comenzará las operaciones científicas rutinarias a finales de abril, ya ha efectuado observaciones prometedoras de estrellas que albergan exoplanetas, lo que augura un sinfín de apasionantes descubrimientos en el futuro.
Lanzado en diciembre de 2019, el Satélite para la Caracterización de Exoplanetas (Cheops) abrió su ojo al universo a finales de enero y poco después tom ó las primeras imágenes, deliberadamente borrosas, de las estrellas. Este desenfoque intencionado es fundamental para la estrategia de observación de la misión, que mejora la precisión de las mediciones al dispersar la luz procedente de estrellas distantes a través de los numerosos píxeles de su detector.
ó las primeras imágenes, deliberadamente borrosas, de las estrellas. Este desenfoque intencionado es fundamental para la estrategia de observación de la misión, que mejora la precisión de las mediciones al dispersar la luz procedente de estrellas distantes a través de los numerosos píxeles de su detector.
La precisión es clave para la actual investigación exoplanetaria. Se sabe que hay más de cuatro mil planetas orbitando estrellas distintas del Sol. Un siguiente paso importantísimo es empezar a caracterizarlos para conocer su estructura, formación y evolución.
Caracterizar estos planetas midiendo de forma precisa sus tamaños (especialmente en el caso de los planetas más pequeños) es justamente el objetivo de Cheops. No obstante, antes de que se considerase listo para llevar a cabo esta tarea, el satélite, de 1,5 m de longitud, tenía que superar un gran número de pruebas.
Rendimiento excepcional
Con las primeras series de pruebas de vuelo, efectuadas entre enero y febrero, los expertos de la misión comenzaron a analizar la respuesta del satélite y, más concretamente, de su telescopio y su detector en el entorno espacial. Durante marzo, Cheops se centró en estrellas bien estudiadas.
Este acercamiento ha permitido a los equipos de la ESA, el consorcio de la misión y Airbus España, que es el contratista principal, verificar que el satélite es lo bastante preciso y estable como para cumplir sus ambiciosos objetivos.
El periodo de puesta en servicio ha demostrado que Cheops alcanza la precisión fotométrica necesaria y, aún más importante, que según las necesidades el satélite se puede gobernar desde el segmento de tierra para llevar a cabo las observaciones científicas.
La hora de los exoplanetas
Durante las últimas dos semanas de la fase de puesta en servicio en órbita, Cheops observó dos estrellas anfitrionas de exoplanetas mientras estos transitaban por delante de ellas y tapaban una fracción de su luz. La observación de tránsitos de exoplanetas conocidos es precisamente para lo que se diseñó la misión: para medir con una precisión y una exactitud sin precedentes el tamaño de los planetas y para determinar sus densidades combinando estos datos con la medida independiente de sus masas.
Uno de los objetiv os fue HD 93396, una estrella subgigante amarilla situada a 320 años luz, algo más fría y tres veces mayor que nuestro Sol. Las observaciones se centraron en KELT-11b, un planeta gaseoso alrededor de un 30 % mayor que Júpiter, en una órbita mucho más cercana a la estrella de lo que Mercurio se halla del Sol.
os fue HD 93396, una estrella subgigante amarilla situada a 320 años luz, algo más fría y tres veces mayor que nuestro Sol. Las observaciones se centraron en KELT-11b, un planeta gaseoso alrededor de un 30 % mayor que Júpiter, en una órbita mucho más cercana a la estrella de lo que Mercurio se halla del Sol.
La curva de luz de esta estrella muestra una fuerte caída causada por el tránsito de ocho horas de KELT-11b. A partir de esos datos, los científicos han determinado con gran precisión el diámetro del planeta: 181.600 km, con una incertidumbre de menos de 4.300 km.
El 25 de marzo tuvo lugar una revisión formal del rendimiento del satélite y las operaciones del segmento de tierra, que Cheops superó con nota. A continuación, la ESA cedió la responsabilidad de operar la misión al consorcio liderado por Willy Benz.
Por suerte, las actividades de puesta en servicio no se han visto afectadas demasiado por la emergencia causada por la pandemia de coronavirus, que ha hecho que se apliquen medidas de distanciamiento social y restricciones a los desplazamientos en toda Europa para evitar la propagación de la enfermedad.
En estos momentos, Cheops está pasando a la fase de operaciones científicas rutinarias, que se espera que comiencen a finales de abril. Los científicos han empezado a observar algunos de los “objetivos científicos tempranos”: una selección de estrellas y sistemas planetarios escogidos por constituir ejemplos paradigmáticos de lo que la misión puede lograr. Incluyen una “supertierra caliente” conocida como 55 Cancri e, cubierta de un océano de lava, y un “neptuno templado”, GJ 436b, que está perdiendo su atmósfera debido al resplandor de su estrella anfitriona. Otra estrella en la lista de próximas observaciones de Cheops es una enana blanca, primer objetivo del Programa de Observadores Invitados de la ESA, que ofrece a científicos más allá del consorcio de la misión la oportunidad de aprovechar la misión y capitalizar sus capacidades de observación.


Tipos de exoplanetas según su composición (ESA).
Al estar situado en el espacio, CHEOPS podrá realizar medidas fotométricas de alta precisión, lo que permitirá obtener curvas de luz de los tránsitos exoplanetarios con poco ruido. Esto servirá a su vez para determinar el tamaño del planeta con un error menor y, por ende, su densidad, un paso fundamental para caracterizar los distintos tipos de exoplanetas que existen. Dada su enorme sensibilidad, CHEOPS se centrará en los exoplanetas más pequeños, aquellos con tamaños comprendidos entre el de Neptuno y la Tierra, con especial énfasis en las supertierras. Estas medidas servirán para cribar los mejores candidatos que deben ser observados en el futuro con telescopios espaciales más complejos y caros, como por ejemplo el James Webb de la NASA o la nueva generación de supertelescopios terrestres.
Zona de observación de CHEOPS en la bóveda celeste (ESA).

Órbita de CHEOPS (ESA).
Detalles del telescopio (ESA).

Parte trasera de CHEOPS (ESA).
Países que participan en CHEOPS (ESA).

Fases del lanzamiento de CHEOPS (ESA).
Con CHEOPS comienza una nueva era en las misiones espaciales en la que, además de seguir descubriendo nuevos exoplanetas, comenzamos a caracterizarlos para comprender mejor sus características. Después de CHEOPS, la ESA está desarrollando la misión ARIEL con el fin de estudiar las atmósferas exoplanetarias en detalle durante la próxima década. Ahora solo queda esperar que durante los tres años y medio que durará su misión primaria —que se podrá prolongar si no hay problemas— CHEOPS recabe toda la información que pueda sobre los exoplanetas y nos ayude a clasificar mejor el fascinante zoológico exoplanetario y a resolver algunos misterios, como, por ejemplo, la línea divisoria entre minineptunos y supertierras.



Traslado a la rampa (Arianespace).
CHEOPS antes del lanzamiento (ESA).
Despegue (Arianespace).
Puerto espacial regional del Atlántico medio
Puerto espacial regional del Atlántico medio

{kind=link}
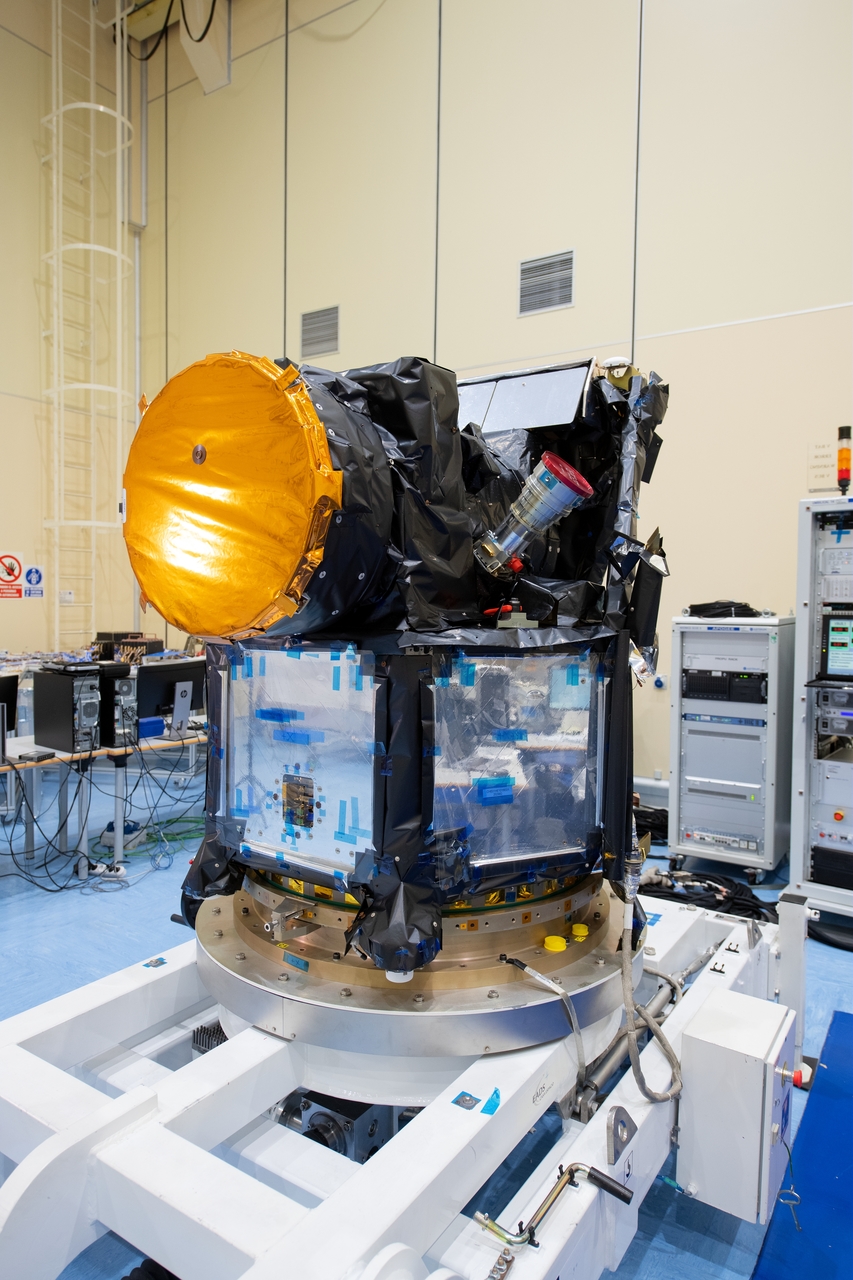{kind=link}
Vista aérea de las dos plataformas de lanzamiento de MARS.
Datos generales
País: Estados Unidos
Ciudad / Región: Virginia
Información del contacto: 37 ° 50 ′ 36 ″ N, 75 ° 28 ′ 41 ″ W
Gerente: Espacio de Virginia
Estado: Operacional
Fecha de creación: 2005
Número medio de lanzamientos por año: 0 a 4 / año
Instalaciones
Sin disparos a ctivos: 0A (Antares) 0B (Minotauro)
ctivos: 0A (Antares) 0B (Minotauro)
Vuelos tripulados: No
Orbe. Geoestacionario: No
Orbe. Polar: No
Direcciones de tiro: entre 38 y 60 °
Geolocalización en el mapa: Virginia
Puerto espacial regional del Atlántico medio
Geolocalización en el mapa: Estados Unidos
El puerto espacial regional del Atlántico medio generalmente designado por sus siglas MARS es una base de lanzamiento espacial dedicada a los lanzadores comerciales. Se encuentra en la isla de Wallops Island ubicada en la costa este de los Estados Unidos en el estado de Virginia. MARS es junto a la plataforma de lanzamiento de Wallops Island de la agencia espacial estadounidense, NASA. La base tiene dos plataformas de lanzamiento desde las que se disparan los lanzadores Minotaur Light y Antares Medium. El primer vuelo tuvo lugar en 2006.
Histórico
Antares 130 en posición de disparo.
El Estado de Virginia creó en 1995 la empresa Virginia Commercial Space Flight Authority generalmente conocida con el nombre de Virginia Space cuyo objetivo es promover la investigación y la industria espacial en el territorio del Estado. En 1997, Virginia Space firmó un contrato con la NASA para el uso del extremo sur de la base de lanzamiento de Wallops Island para establecer una base de lanzamiento dedicada a vuelos comerciales y denominada Mid-Atlantic Regional Spaceport. La base está autorizada para disparos con acimut entre 38 y 60 °. La primera plataforma de lanzamiento 0A se construyó para lanzar el cohete comercial Conestoga, pero el desarrollo del lanzador se detuvo incluso antes de su primer vuelo.
La plataforma de lanzamiento 0B entró en funcionamiento en 1999 y se utilizó durante el primer vuelo para disparar un cohete Minotaur I de la Orbital Sciences Corporation, que puso en órbita pequeños satélites militares. Posteriormente, la plataforma de lanzamiento se utiliza regularmente para lanzar cohetes de esta familia de lanzadores. En 2013, el disparo se modificó para permitir el lanzamiento del Minotauro V . En 2009, Orbital Sciences Corporation , que ganó el contrato de suministro de la Estación Espacial Internacional con SpaceX (programa COTS ), decidió lanzar los cargueros Cygnus responsables de llevar carga a la estación espacial desde MARS. Entre 2009 y 2011 se modificó la plataforma de lanzamiento 0A para permitir el montaje del lanzador medio Antares y su lanzamiento. El primer disparo tiene lugar en21 de abril de 2013. La28 de octubre de 2014 la primera etapa del lanzador Antares falló unos segundos después del despegue y la explosión dañó la plataforma de lanzamiento, que sin embargo fue reparada unos meses después.
Instalaciones
Plataforma 0A
La plataforma de lanzamiento 0A se utiliza para disparar el lanzador Antares. Incluye una rampa de acceso al puesto de tiro colocada sobre pilares de hormigón. Un sistema de diluvio permite atenuar las vibraciones acústicas. El lanzador con su carga útil es transportado horizontalmente por un vehículo neumático desde el edificio de ensamblaje Orbital cercano y luego colocado verticalmente en el sitio. Las instalaciones permiten el almacenamiento y llenado de tanques de oxígeno líquido.
Plataforma 0B
La plataforma de lanzamiento 0B está dedicada al lanzamiento de la familia Minotaur de cohetes propulsores sólidos ligeros . Una torre de servicio permite el montaje in situ del lanzador.

Cerca de la plataforma de lanzamiento 0A, en el edificio de montaje Orbital, el lanzador Antares se coloca en el vehículo montador.
 Una rampa permite transportar el lanzador Antares a la plataforma de lanzamiento 0A ATK
Una rampa permite transportar el lanzador Antares a la plataforma de lanzamiento 0A ATK
Plataforma 0B con un lanzador Minotaur V
Puerto Espacial Regional Del Atlántico Medio
El puerto espacial Regional del Atlántico Medio (MARS) es una instalación comercial de lanzamiento espacial ubicada en el extremo sur de las instalaciones de vuelo Wallops de la NASA en la isla Wallops, justo al este de la Península Delmarva y al sur de Chincoteague, Virginia, Estados Unidos.
En 2007, la NASA eligió a la Compañía de Orbital Sciences Corporation de Virginia (de 2018 Northrop Grumman Innovation Systems) para participar en el programa, los Servicios Comerciales de transporte Orbital (COTS) y luego a un contrato de servicios comerciales de reabastecimiento (CRS) con el fin de construir y probar un nuevo lanzador, Antares, para reabastecer la Estación Espacial Internacional (ISS). El contrato del SIR incluía ocho misiones para transportar aproximadamente 20 000 kg de carga a la Estación Espacial Internacional y para la eliminación de desechos. Estos lanzamientos tuvieron lugar en la nueva plataforma de lanzamiento 0A de Marte. Para MARS ” ramp 0B, VCSFA hizo cambios y mejoras para lanzar la misión lunar Atmosphere and Dust environment Explorer (LADEE) de la NASA a la luna a mediados de 2013 en un nuevo lanzador, el Minotaur V. También a mediados de 2013, la Fuerza Aérea de los Estados Unidos lanzó ORS – 3 desde la rampa 0B de Marte. Marte es uno de los pocos sitios que ha sido autorizado por la oficina de transporte espacial comercial de la FAA para su lanzamiento en órbita. Además, Virginia es el hogar del Centro de Investigación Langley de la NASA (LARC) y la Oficina Nacional de reconocimiento (Nro), y como tal es el receptor de gran parte del presupuesto federal para el espacio.
El puerto espacial Regional del Atlántico medio tiene tres rampas de lanzamiento activas: rampa 0A, rampa 0B y el Rocket Lab Launch Complex – 2. La plataforma de lanzamiento 0A (LP – 0A) fue construida para el lanzamiento del lanzador Conestoga, cuyo único vuelo fue en 1995. La plataforma de lanzamiento fue demolida en septiembre de 2008, y luego reconstruida para ser utilizada por el lanzador Antares de Northrop Grumman Innovation Systems. Las modificaciones de rampa para Antares incluyeron la construcción de una estructura de integración horizontal para la integración del lanzador/carga útil, y un transportador/erector con ruedas que debía llevar el lanzador a la plataforma de lanzamiento y colocarlo verticalmente aproximadamente 24 horas antes del lanzamiento. La planta sufrió daños significativos durante la falla del lanzamiento de Antares el 28 de octubre de 2014. Las estimaciones preliminares para la reconstrucción de la rampa indicaban que se esperaba que el costo rondara los 20 millones de dólares. En mayo de 2015, esta estimación se revisó a 13 millones de dólares y se esperaba que las reparaciones se completaran en septiembre u octubre de 2015 con el próximo lanzamiento programado para marzo de 2016. El 30 de septiembre de 2015, se anunció la finalización de las reparaciones en la rampa 0A. Launch Pad 0B (LP – 0B) entró en funcionamiento en 1999, y más tarde mejoró con la construcción de una torre de servicio móvil, completada en 2004. Es activo y utilizado para lanzadores de Minotauro. En octubre de 2018, Rocket Lab anunció que había elegido Marte como su segundo sitio de lanzamiento, llamado Rocket Lab Launch Complex – 2. La compañía comenzó la construcción en febrero de 2019, junto con la Virginia Commercial Space Flight Authority (Virginia Space). La rampa se encuentra en el puerto espacial Regional del Atlántico Medio (Marte) de la instalación de vuelo Wallops de la NASA. El 12 de diciembre de 2019, Rocket Lab anunció la finalización de la construcción del complejo de Lanzamiento – 2 y el inicio de los lanzamientos a partir de 10 meses más tarde, en una nueva plataforma de lanzamiento cerca de la rampa 0A. El primer lanzamiento está previsto para el tercer trimestre de 2020. En una conferencia de prensa el mismo día en las instalaciones de vuelo de Wallops, el programa de pruebas espaciales de la USAF fue anunciado como el primer cliente para el lanzador electrón. La misión lanzará un único microsatélite de investigación y desarrollo. El nuevo complejo de lanzamiento también tiene una estructura de integración.
DART La primera prueba de defensa planetaria de la historia
Artículo extraído de varios archivos de la revista de Astronáutica Eureka
Nave
Partes de DART (NASA).

DART fue lanzada el 24 de noviembre de 2021 mediante un Falcon 9 que despegó desde la base de Vandenberg (California). La sonda, construida y gestionada por el APL (Applied Physics Laboratory) de la Universidad Johns Hopkins, tenía inicialmente una masa de 610 kg, pero ha gastado cerca de 60 kg de propelente en su camino al sistema Dídimo. En concreto, la nave ha consumido 10 kg de xenón como propelente de su motor iónico NEXT-C y unos 50 kg de hidrazina que alimentan doce propulsores monopropelentes MR-103G de Aerojet Rockedtyne para el control de posición que son capaces de generar 1 newton de empuje cada uno (estos son los motores empleados en la fase final del choque). El NEXT-C (NASA Evolutionary Xenon Thruster–Commercial) ha sido desarrollado por el centro Glenn de la NASA y esta es la primera misión que se usa este motor de propulsión solar eléctrica avanzado, con un empuje variable de entre 25 y 235 milinewton. Sin embargo, el equipo de DART solo usó el NEXT-C durante unas dos horas debido a varios problemas que surgieron con el voltaje del sistema. En caso de que DART hubiese fallado su objetivo, el motor NEXT-C podría haber sido empleado para regresar al asteroide Dídimo dentro de dos años. DART tenía un cuerpo central cúbico con unas dimensiones de 1,2 x 1,3 x 1,3 metros y una envergadura de 18 metros gracias a sus paneles solares flexibles de tipo ROSA (Roll-Out Solar Arrays), con una superficie de 22 metros cuadrados y capaces de generar hasta 7,4 kilovatios de potencia. Cada panel ROSA tiene una longitud de 8,5 metros. DART es la primera sonda planetaria que emplea este tipo de paneles solares flexibles.

Elementos de DART (NASA).
La cámara DRACO (Reconnaissance and Asteroid Camera for Optical navigation) de DART está basada en la cámara LORRI de la sonda New Horizons. La cámara usa un telescopio de 20,8 centímetros de apertura y tiene un ángulo de visión de 0,29º. La cubierta protectora de DRACO fue eyectada el pasado 7 de diciembre de 2021 y su primera imagen fue un campo estelar de las constelaciones de Perseo, Tauro y Aries. En total, DRACO ha obtenido unas 150 000 imágenes para poder ser calibrada adecuadamente. Por ejemplo, el 10 de diciembre tomó una imagen del cúmulo M38 y el 27 de mayo una de la estrella Vega. El 27 de julio la cámara DRACO pudo captar el sistema Dídimo por primera vez cuando estaba a 32 millones de kilómetros del objetivo. DRACO volvió a fotografiar el asteroide binario los días 12, 13 y 22 de agosto. El 1 de julio y el 2 de agosto la cámara se empleó para probar el sistema de navegación autónoma SMART Nav con imágenes de Júpiter. Los encargados de la misión se aprovecharon de la aparición de Europa después de permanecer oculta por el disco de Júpiter para simular la detección de D imorfo por DRACO al ser visible a medida que DART se acerque al sistema Dídimo. DRACO lleva el detector de tipo sCMOS CIS2521 de BAE, con 5 terapíxels en una matriz de 2560×2160. El ordenador de DART, denominado SBC (Single Board Computer) se encarga de procesar y enviar las imágenes. El ordenador emplea un procesador UT700 LEON3 e incluye 32 MB de memoria SRAM y 16 GB de almacenamiento flash. En las últimas tres semanas antes del choque, DART ha realizado tres maniobras para corregir su trayectoria utilizando imágenes de la cámara DRACO tomadas cada cinco horas. La última maniobra tuvo lugar apenas un día antes del choque, el 25 de septiembre.
imorfo por DRACO al ser visible a medida que DART se acerque al sistema Dídimo. DRACO lleva el detector de tipo sCMOS CIS2521 de BAE, con 5 terapíxels en una matriz de 2560×2160. El ordenador de DART, denominado SBC (Single Board Computer) se encarga de procesar y enviar las imágenes. El ordenador emplea un procesador UT700 LEON3 e incluye 32 MB de memoria SRAM y 16 GB de almacenamiento flash. En las últimas tres semanas antes del choque, DART ha realizado tres maniobras para corregir su trayectoria utilizando imágenes de la cámara DRACO tomadas cada cinco horas. La última maniobra tuvo lugar apenas un día antes del choque, el 25 de septiembre.
Características de la cámara DRACO (NASA).
Cámara DRACO (NASA).

Una de las primeras imágenes de DRACO del 10 de diciembre de 2021: un campo estelar con el cúmulo M38 (NASA).

Imagen de Júpiter y sus lunas tomada por DRACO en agosto para probar el sistema SMART Nav (NASA).

Primera imagen de Dídimo captada por DRACO (un mosaico de 243 imágenes), del 27 de julio (NASA).
El otro gran protagonista del evento ha sido la pequeña sonda italiana LICIACube, encargada de grabar el choque. LICIACube (Light Italian Cubesat for Imaging of Asteroids) —recuerda que ‘Licia’ se pronuncia licha en italiano—es un cubesat 6U de 14 kg construido por la empresa Argotec para la Agencia Espacial Italiana (ASI). Sus dimensiones, una vez desplegados los paneles solares, son de 91,2 x 36,6 x 23,9 centímetros. LICIACube es la primera sonda de espacio profundo italiana. Lleva dos instrumentos, las cámaras LEIA y LUKE (se ve que a alguien de la misión le gusta Star Wars…). LEIA (LICIACube Explorer Imaging for Asteroid), es una cámara en blanco y negro con una resolución máxima de 1,38 metros por píxel a 55 kilómetros de distancia, una distancia focal de 220 milímetros y un campo de 2,06º. Por su parte, LUKE (LICIACube Unit Key Explorer), es una cámara a color con una distancia focal de 70,55 milímetros y un campo de visión de 5º, capaz de obtener imágenes de Dimorfo con una resolución máxima de 4,31 metros por píxel. Por tanto, LEIA tomará imágenes en alta resolución en blanco y negro y LUKE imágenes de mayor campo a color.
negro y LUKE imágenes de mayor campo a color.
LICIACube (ASI).

Con suerte, LICIA Cube habrá obtenido un mínimo de tres imágenes del material eyectado por el impacto de DART y otras tres del hemisferio opuesto al choque. Se espera que la cámara LEIA haya captado el momento del impacto de DART contra Dimorfo y, luego, que tanto LEIA como LUKE hayan visto la evolución del material expulsado y, quizá, el nuevo cráter. Tras sobrevolar Dídimo, LICIACube habrá quedado en órbita solar, desde donde enviará las imágenes los próximos días. LICIACube tiene unas dimensiones de 36,6 x 23,9 x 11,6 centímetros plegado y 91,2 x 36,6 x 23,9 centímetros una vez desplegado. Ha sido diseñado tomando como base el cubesat Argomoon que viajará en la misión Artemisa I. LICIACube se separó de DART el pasado 11 de septiembre mediante un mecanismo de muelles. Dentro del proceso de calibración de las cámaras, el 21 de septiembre la cámara LEIA captó una imagen de la Tierra y el día 22 la cámara LUKE fotografió las Pléyades.
LICIACube (ASI).

La órbita del asteroide binario Dídimo alrededor del Sol es marcadamente elíptica, con un perihelio cercano a la órbita de la Tierra, a 150 millones de kilómetros (1 Unidad Astronómica), y un afelio a 340,5 millones de kilómetros (2,27 UA). La inclinación del plano orbital es de solo 3,4º de inclinación. Estas características permiten que Dídimo pueda ser alcanzado fácilmente —en términos de Delta-V— por una sonda lanzada desde la Tierra mientras está cerca de su perihelio.
Las Pléyades vistas por la cámara LUKE de LICIACube (ASI).
Originalmente, DART debía ser parte de la misión AIDA (Asteroid Impact and Deflection Assessment mission), realizada conjuntamente con la agencia espacial europea (ESA). La ESA se iba a encargar de suministrar la sonda AIM (Asteroid Impact Mission) para observar el impacto de DART contra Dimorfo y estudiar en detalle el cráter resultante. Lamentablemente, AIM fue cancelada por la ESA y DART se quedó sin sonda que contemplase el choque en primera fila. Posteriormente, la ESA logró sacar adelante la misión Hera, que debe despegar en 2024. Evidentemente, Hera no podrá grabar el choque de DART, pero podrá analizar en detalle el cráter y los efectos de la colisión cuando llegue a Dídimo en 2026 (la sonda, de 1050 kg, llevará además los cubesats Juventas y Milani). Ahora queda esperar a las imágenes de LICIACube y, por supuesto, de los observatorios terrestres, el Hubble y el James Webb para estudiar los efectos del choque y la naturaleza de Dimorfo y Dídimo. Sea como sea, DART ya es historia tras haber cumplido con éxito su misión.
Trayectoria de DART y órbita de Dídimo (NASA).

Misión: colisionar con un asteroide (posiblemente peligroso), y alterar su trayectoria de choque.
DART se ha volatilizado en la colisión (NASA).
Acercamiento y colisión
La primera prueba de defensa planetaria de la historia: DART choca contra el asteroide Dimorfo

Tuesday 27 September 2022 — 01:49
El asteroide Dimorfo momentos antes del choque de DART (NASA).
La NASA ha vuelto a hacer historia. El 26 de septiembre de 2022 a las 23:14 UTC la sonda DART ha chocado contra el asteroide Dimorfo, volatilizándose en el proceso y completando así la primera prueba de defensa planetaria de la Humanidad. Nuestra especie ha decidido al fin que no quiere terminar como los dinosaurios y otras tantos seres vivos extinguidos por culpa del choque caprichoso de cuerpos menores del sistema solar contra la Tierra. La sonda DART (Double Asteroid Redirection Test), de 550 kg de masa en el momento del choque, ha impactado a 21 960 km/h (6,1 km/s) contra el asteroide Dimorfo, de 163 metros de diámetro. Dimorfo (Dimorphos en inglés) es en realidad un satélite del asteroide Dídimo (Didymos), de 780 metros, de ahí que ambos objetos también reciban la denominación Dídimo A y Dídimo B, respectivamente. Esto no es una casualidad, pues la idea es que el choque de DART contra Dimorfo cambie su órbita alrededor de Dídimo, permitiendo medir con precisión la energía depositada en el proceso. Es decir, la órbita del asteroide binario 65803 Dídimo alrededor del Sol no ha cambiado tras la colisión, pero sí la de Dimorfo alrededor de su hermano mayor. El sistema Dídimo (‘gemelo’ en griego) no es actualmente una amenaza para la Tierra, motivo por el cual esta misión se considera una prueba de concepto del método de interceptor cinético para un futuro sistema de defensa planetaria, un sistema que ahora mismo no existe. Por otro lado, conviene recordar que DART no es la primera misión que chocará a alta velocidad contra un cuerpo menor del sistema solar, ya que este honor le corresponde a la subsonda de la misión Deep Impact de la NASA, que se estrelló el 4 de julio de 2005 contra el cometa Tempel 1.

Dídimo (a la izquierda) y Dimorfo en la última imagen que se pudo ver de ambos objetos en el mismo campo (NASA).
Los momentos finales de la aproximación y el choque fueron captados por la cámara DRACO, que es el único instrumento de la sonda. De hecho, las imágenes de DRACO han servido para que la propia sonda pueda fijar el objetivo y maniobrar en consecuencia, ya que el error en la órbita de Dídimo y la posición de Dimorfo hacen imposible planificar la colisión con antelación desde la Tierra. DART ha usado el sistema SMART Nav (Small-body Maneuvering Autonomous Real-Time Navigation) para guiar la nave hasta el asteroide mediante las imágenes de esta cámara. Las imágenes se han enviado a la Tierra en tiempo real al ritmo de una por segundo hasta el momento del impacto usando la antena de alta ganancia del vehículo, de diseño RLSA (Radial Line Slot Array). La cámara DRACO solo fue capaz de resolver Dimorfos como un objeto independiente unas cuatro horas antes del impacto. Una hora antes ya fue capaz de resolverlo con una extensión de 1,4 píxeles. Según las previsiones, la imagen final se obtuvo a pocos metros de distancia de Dimorfo. Aunque toda la secuencia fue automática, los controladores de la misión tenían capacidad de intervenir en caso necesario hasta unos minutos antes del choque, una limitación impuesta por el retraso en las comunicaciones debido a la distancia de Dídimo con respecto a la Tierra (en estos momentos, de unos 11,4 millones de kilómetros). El equipo de DART cree que la sonda impacto a tan solo 70 metros del punto prev isto.
isto.
Antepenúltima imagen de la superficie de Dímorfo (NASA).
Última imagen de DART antes de suicidarse (NASA).

Dimorfo ha resultado ser, aparentemente, un objeto de tipo ‘pila de escombros’ como los asteroides Ryugu y Bennu, visitados recientemente por las misiones Hayabusa 2 y OSIRIS-REx. A pesar de que, por motivos obvios, DART no pudo grabar su propio impacto, se espera que el pequeño satélite italiano LICIACube, que se separó de DART el pasado 11 de septiembre, sí pudiera hacerlo. Con suerte, las cámaras LEIA y LUKE de LICIACube grabaron el choque de DART contra Dimorfo y expulsión de material provocado por este (el momento del impacto solo fue grabado por la cámara LEIA). LICIACube sobrevoló Dimorfo 165 segundos después del impacto a una distancia mínima de unos 55 kilómetros para intentar fotografiar el cráter  generado DART. No obstante, las imágenes de LICIACube, con una resolución máxima de entre 5 y 2 metros por píxel, tardarán varios días en llegar a la Tierra usando la Red de Espacio Profundo (DSN) de la NASA (se espera, eso sí, que la primera llegue a lo largo de hoy). Varios observatorios terrestres, los telescopios espaciales Hubble y James Webb, así como la sonda Lucy, también observaron el choque a millones de kilómetros (visto desde la Tierra, Dídimo tiene una magnitud de 14-15).
generado DART. No obstante, las imágenes de LICIACube, con una resolución máxima de entre 5 y 2 metros por píxel, tardarán varios días en llegar a la Tierra usando la Red de Espacio Profundo (DSN) de la NASA (se espera, eso sí, que la primera llegue a lo largo de hoy). Varios observatorios terrestres, los telescopios espaciales Hubble y James Webb, así como la sonda Lucy, también observaron el choque a millones de kilómetros (visto desde la Tierra, Dídimo tiene una magnitud de 14-15).
DART y Dimorfo a escala (NASA).

La NASA estima que serán necesarios unos dos meses para determinar con precisión el cambio de periodo orbital de Dimorfo debido al impacto usando observaciones de telescopios terrestres y espaciales. Dimorfo orbita Dídimo a una distancia de 1,2 kilómetros, con un periodo de 11 horas y 55 minutos, por lo que su velocidad orbital es de tan solo 17 cm/s. El periodo de rotación de Dimorfo alrededor de su eje se supone que será similar al de traslación por las fuerzas de marea —el de Dídimo es de 2,26 horas—, pero bien podría ser diferente. De ser así, los efectos del impacto de DART también serán muy distintos. La masa de Dimorfo se estima en unas 5 millones de toneladas y el impacto de DART apenas modificará su velocidad en 1 mm/s, aproximadamente. Este cambio de velocidad es minúsculo, pero cambiará el periodo orbital de Dimorfo en un 1% más o menos. Si Dimorfo orbitase directamente el Sol, los efectos del impacto apenas habrían cambiado su periodo alrededor de nuestra estrella en un 0,000006%.
Secuencia planeada de imágenes antes del choque (NASA).

Resumen de las fases de la misión (NASA).

El choque de DART debe haber cambiado el periodo orbital de Dimorfo en un 1% más o menos (NASA).
Confirmado: DART ha desviado al asteroide Dimorphos
El tiempo que Dimorphos tarda en recorrer su órbita se ha acortado 32 minutos tras el impacto
11-10-2022 | 20:42 H
La NASA ha confirmado que DART ha logrado desviar al asteroide Dimorphos con su colisión. Aunque, es posible que esta noticia te parezca desactualizada. ¿No se había confirmado ya, acaso? En cierto modo sí, teníamos indicios, pero por otro lado no, de hecho, ni siquiera se ha confirmado del todo, pero ahora tenemos un nuevo dato que parece apuntar en la dirección correcta. Hasta ahora teníamos imágenes de la colisión y del resultado del impacto, con el material eyectado en torno a Dimorphos e incluso una cola de partículas, como si fuera un cometa, pero lo que acaba de confirmarse es algo diferente. Tras medir el tiempo que tarda Dimorphos en orbitar a su asteroide Didymos, parece que su periodo se ha acortado en 32 minutos. Hasta hace poco sabíamos que su periodo de 12 horas se había recortado un poco, pero no estaba claro cuánto. Ahora, Bill Nelson, director de la NASA lo ha confirmado en rueda de prensa.
Con DART, lo que realmente queríamos era comprobar si podíamos desviar determinados asteroides para así protegernos en un futuro de los potenciales peligros astronómicos que nos acechen. Esa era la idea, así de simple y así de compleja. Aparentemente sacada de una película de ciencia ficción, pero tan seria y rigurosa como la NASA suele ser. Todavía se están estudiando los resultados de la misión, pero, mientras tanto, va llegando información sorpresa. Detalles predecibles pero que la prensa no había advertido hasta ahora y que, lógicamente, inquietan al público.
Antes de seguir, conviene recordar algunos detalles básicos sobre la misión DART. Porque desviar un asteroide impactando una sonda es como intentar mover un coche disparándole bolas de billar, hacía falta una buena estrategia. El objetivo elegido fue el asteroide Dimorphos, que da vueltas en torno a uno mayor llamado Didymos. Si el impacto conseguía ralentizar mínimamente a Dimorphos, este aproximaría su órbita a Didymos y cambiaría su trayectoria, como si fuera una reacción en cadena. La otra clave era la velocidad de la sonda, que colisionó a 22.530 kilómetros por hora mientras que Dimorphos viajaba a 0,72 kilómetros por hora. De ese modo se compensaba algo su diferencia de peso, entre los 610 kilos de la sonda y los 5.000 millones de kilos de Dimorphos. A falta de una confirmación más precisa, parece que el impacto logró su objetivo y redujo en unos minutos las 12 horas que tarda Dimorphos en rodear a Didymnos.
Los 32 minutos de DART: por primera vez la humanidad cambia la órbita de un asteroide.
Los 32 minutos de DART: por primera vez la humanidad cambia la órbita de un asteroide
12 October 2022 — 01:07
32 minutos. Esa es la diferencia en el periodo del asteroide Dimorfo provocada por el choque de la sonda DART a 6,1 km/s. Por primera vez, la humanidad ha logrado cambiar de forma apreciable la órbita de un asteroide. Bien es cierto que Dimorfo no suponía ninguna amenaza para la Tierra y que giraba alrededor del asteroide Dídimo, pero lo importante es que la órbita ha sido modificada significativamente, de tal modo que hemos sido capaces de medir los cambios desde observatorios terrestres. Dimorfo orbitaba alrededor de Dídimo con un periodo de 11 horas y 55 minutos. Tras la colisión de DART el pasado 26 de septiembre a las 23:14 UTC, ahora lo hace con un periodo de 11 horas y 23 minutos, con un error de 2 minutos. Es decir, un cambio en el periodo dl 4%. Los modelos, muy poco precisos al desconocerse la composición y estructura interna de Dimorfo, predecían un cambio de entre 73 segundos y unas pocas decenas de minutos, por lo que el choque de DART se sitúa en la parte más alta de los posibles resultados.

La nube de fragmentos generada por el choque de DART contra Dimorfo vista por el satélite italiano LICIACube. Dídimo aparece pegado a Dimorfo abajo a la derecha (ASI/NASA/APL).
Cuatro telescopios terrestres (Observatorio de Las Campanas y el telescopio danés en el observatorio de La Silla, ambos en Chile, así como la red del observatorio de Las Cumbres en Chile y Sudáfrica) se han usado para determinar el nuevo periodo de Dimorfo, empleando los eclipses mutuos entre los dos cuerpos del asteroide doble como hitos. También se ha usado los radaiotelescopios de Goldstone (California) y Green Bank (Virginia Occidental) para determinar la posición de Dimorfo mediante radar, confirmando la variación en el periodo. El día del impacto, el descubrimiento de que Dimorfo era un asteroide de tipo pila de escombros hizo pensar que los efectos del choque no serían muy marcados (los impactos en este tipo de asteroides son menos efectivos que en asteroides sólidos). Aunque todavía no se ha analizado a fondo la dinámica del choque, que depende de muchos factores (densidad, cohesión del material, etc.), es posible que los llamativos e impresionantes chorros de material eyectado hayan servido para «propulsar» al asteroide en la dirección contraria al sentido de avance orbital.

Las observaciones de telescopios terrestres han permitido medir el cambio en el periodo de Dimorfo, especialmente gracias al uso de los eclipses (NASA/Johns Hopkins APL/Astronomical Institute of the Academy of Sciences of the Czech Republic/Lowell Observatory/JPL/Las Cumbres Observatory/Las Campanas Observatory/European Southern Observatory Danish (1.54-m) telescope/University of Edinburgh/The Open University/Universidad Católica de la Santísima Concepción/Seoul National Observatory/Universidad de Antofagasta/Universität Hamburg/Northern Arizona University).
Dídimo y Dimorfo vistos mediante radar desde la Tierra. El círculo verde muestra la posición actual de Dimorfo y el azul la posición en  la que debería estar de no haber chocado DART contra él ( NASA/Johns Hopkins APL/JPL/NASA JPL Goldstone Planetary Radar/National Science Foundation’s Green Bank Observatory).
la que debería estar de no haber chocado DART contra él ( NASA/Johns Hopkins APL/JPL/NASA JPL Goldstone Planetary Radar/National Science Foundation’s Green Bank Observatory).
La formación de estos chorros, captados por el pequeño satélite italiano LICIACube (Light Italian CubeSat for Imaging of Asteroids), es un proceso que no se entiende muy bien, pues cabría esperar que un impacto como el de DART generase una nube homogénea de fragmentos. No obstante, el proyectil lanzado por Hayabusa 2 contra Ryugu produjo unos chorros parecidos, aunque a mucha menor escala. Parece ser que estos chorros se forman no solo en los asteroides, sino también en cualquier mundo sin atmósfera, como por ejemplo la Luna o Mercurio, y podrían estar detrás de los característicos rayos que emanan de los cráteres más jóvenes.

Dídimo (izquierda) y Dimorfo con la nube de escombros del choque vistos por la cámara LUKE de LICIACube segundos antes de pasar a la mínima distancia del conjunto (LICIACube está ahora en órbita solar) (ASI/NASA).

La nube de escombros vista por LICIACube después de pasar por el punto más cercano al sistema (ASI/NASA).
Sea como sea, las imágenes de LICIACube serán determinantes para entender el impacto de DART hasta que la sonda europea Hera llegue a Dídimo para analizar en alta resolución el cráter creado por el choque. Esta nube de material ha servido para convertir al asteroide Dídimo en un pequeño cometa, con una cola de polvo que se extiende más de diez mil kilómetros por efecto de la presión de radiación de la luz solar. La dinámica de esta cola, que presenta una estructura doble, también es toda una sorpresa para los investigadores. La cola, además de por telescopios terrestres, ha sido observada por observatorios espaciales como el Hubble y el James Webb. Gracias a que la magnitud en el cambio del periodo ha sido muy alta, la NASA ha podido confirmar el éxito del choque de DART pocas semanas después del suceso, aunque antes del 26 había anunciado que podría tardar meses en determinar la nueva órbita.

Vista de la nube de fragmentos por el Hubble y el James Webb el 8 de octubre (NASA/ESA/STScI).
Por otro lado, conviene recordar que no es la primera vez que la humanidad cambia la órbita de un objeto astronómico, pues ese es un mérito que podríamos conceder a la misión Deep Impact o, ya que estamos, a cualquier sonda que haya realizado una maniobra de asistencia gravitatoria. Pero sí es la primera vez que se cambia la órbita de un objeto de forma apreciable y, además, podemos medir ese cambio con precisión. Pero, ¿serviría una misión como DART para desviar la órbita de un asteroide peligroso que amenazase la Tierra? Hay que tener en cuenta que Dimorfo es un pequeño asteroide de 163 metros de diámetro y que DART apenas tenía 550 kg en el momento del choque. El principal objetivo de DART no era tanto el cambio de órbita en sí —que depende de muchos parámetros desconocidos— como verificar el funcionamiento del sistema de guiado autónomo de una sonda mediante el uso de imágenes en tiempo real. Un cambio del 4% en el periodo de un pequeño asteroide que orbita alrededor de otro no significa que una sonda similar pueda cambiar la órbita de un asteroide peligroso alrededor del Sol en la misma magnitud, pero sin duda deja la puerta abierta al desarrollo de un sistema de defensa planetaria con interceptores cinéticos (veremos qué tal le va a la misión china de 2026). No olvidemos que los asteroides más peligrosos no son los más grandes, que están prácticamente todos catalogados, sino los que tienen un tamaño de entre 200 y 500 metros, pues existen todavía muchos de este rango de tamaños sin descubrir.
Debe estar conectado para enviar un comentario.